ёЯЛЩµзВ·PCBНшЈ¬ЧЁЧўУЪЗ¶ИлКЅ·Ѕ°ёЈ¬РЕєЕНкХыРФєНµзФґНкХыРФ·ВХж·ЦОцЈ¬ёЯЛЩµзВ·PCBЙијЖ,ёчЦЦEDA№¤ѕЯЈЁCadence\Mentor\\AD\\CAM\ANSYS HFSSЈ©Ѕ»БчС§П°ЎЈ
ДъРиТЄ µЗВј ІЕїЙТФПВФШ»тІйїґЈ¬Г»УРХКєЕЈїБўјґЧўІб

x
±ѕМыЧоєуУЙ Л®КЦ УЪ 2021-1-29 02:53 PM ±ај
і¬УІёЙ»хЈєI2CЧоИ«ЅМіМЈ¬ѕш¶ФІ»ёєЖЪНыЈЎЈЁНтЧЦі¤ОДЈ¬ЅЁТйКХІШЈ© ЧЄФШ
ФОДБґЅУЈєhttps://m.21ic.com/article/850711.html
ГвФрЙщГчЈєХыАнОДХВОЄґ«ІҐПа№ШјјКхЈ¬°жИЁ№йФЧчХЯЛщУРЈ¬ИзУРЗЦИЁЈ¬ЗлБЄПµЙѕіэ
[size=0.32]01 [size=0.32]Вг»ъІЩЧчЖЄ
±ѕОДТФИэРЗ exynos4412ОЄАэЅІЅвI2CК±РтЈ¬Іў№ТФШФЪI2CїШЦЖЖчmpu6050НУВЭТЗµДКэѕЭ¶БИЎКµАэЎЈНЁ№э±ѕЖЄОДХВЈ¬¶БХЯїЙТФАнЅвI2CК±РтЈ¬ТФј°ИзєО»щУЪИэРЗI2CїШЦЖКµПЦВг»ъ¶БИЎґУЙи±ёРЕПў·Ѕ·ЁЎЈ
З°СФЈє
I2C(Inter-Integrated Circuit)ЧЬПЯ(ТІіЖ IIC »т I2C) КЗУРPHILIPS№«ЛѕїЄ·ўµДБЅПЯКЅґ®РРЧЬПЯЈ¬УГУЪБ¬ЅУОўїШЦЖЖчј°НвО§Йи±ёЈ¬КЗОўµзЧУНЁРЕїШЦЖБмУт№г·єІЙУГµДТ»ЦЦЧЬПЯ±кЧјЎЈЛьКЗН¬ІЅНЁРЕµДТ»ЦЦМШКвРОКЅЈ¬ѕЯУРЅУїЪПЯЙЩЎўїШЦЖ·ЅКЅјтµҐЎўЖчјю·вЧ°РОКЅРЎЎўНЁРЕЛЩВКЅПёЯµИУЕµгЎЈ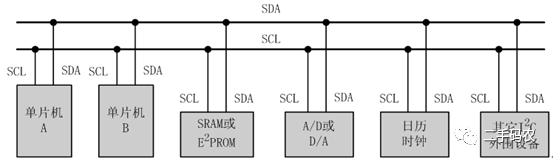
Т»Ўўexynos4412 i2cїШЦЖЖчЧЫКц
Exynos4412ѕ«јтЦёБојЇОўґ¦АнЖчЦ§іЦ4ёцIICЧЬПЯїШЦЖЖчЎЈОЄБЛДЬК№Б¬ЅУФЪЧЬПЯЙПµДЦчєНґУЙи±ёЦ®јдґ«КдКэѕЭЈ¬ЧЁУГµДКэѕЭПЯSDAєНК±ЦУРЕєЕПЯSCL±»К№УГЈ¬ЛыГЗ¶јКЗЛ«ПтµДЎЈ
Из№ы№¤ЧчФЪ¶аЦч»ъµДIICЧЬПЯДЈКЅЈ¬¶аёц4412ґ¦АнЖчЅ«ґУґУ»ъДЗЅУКХКэѕЭ»т·ўЛНКэѕЭёшґУ»ъЎЈФЪIICЧЬПЯЙПµДЦч»ъ¶Л4412»бЖф¶Ї»тЦХЦ№Т»ёцКэѕЭґ«КдЎЈ4412µДIICЧЬПЯїШЦЖЖч»бУГТ»ёц±кЧјµДIICЧЬПЯЦЩІГ»ъЦЖИҐКµПЦ¶аЦч»ъєН¶аґУ»ъґ«КдКэѕЭЎЈ
НЁ№эїШЦЖИзПВјДґжЖчТФКµПЦIICЧЬПЯЙПµД¶аЦч»ъІЩЧчЈє
їШЦЖјДґжЖчЈє I2CCONЧґМ¬јДґжЖчЈє I2CSTATTx/Rx КэѕЭЖ«ТЖјДґжЖчЈє I2CDSµШЦ·јДґжЖчЈє I2CADD
Из№ыI2CЧЬПЯїХПРЈ¬ДЗГґSCLєНSDAРЕєЕПЯЅ«¶јОЄёЯµзЖЅЎЈФЪSCLОЄёЯµзЖЅЖЪјдЈ¬Из№ыSDAУРУЙёЯµЅµНµзЖЅµДМш±дЈ¬ДЗГґЅ«Жф¶ЇТ»ёцЖрКјРЕєЕЈ¬Из№ыSDAУРУЙµНµЅёЯµзЖЅµДМш±дЈ¬Ѕ«Жф¶ЇТ»ёцЅбКшРЕєЕЎЈ
Цч»ъ¶ЛµДЙи±ёЧЬКЗМṩЖрКјєННЈЦ№РЕєЕµДТ»¶ЛЎЈФЪЖрКјРЕєЕ±»·ўіцєуЈ¬Т»ёцКэѕЭЧЦЅЪµДЗ°7О»±»µ±ЧчµШЦ·НЁ№эSDAПЯ±»ґ«КдЎЈХвёцµШЦЖЦµѕц¶ЁБЛЧЬПЯЙПµДЦчЙи±ёЅ«ТЄСЎФсДЗёцґУЙи±ёЧчОЄґ«Кд¶ФПуЈ¬bit8ѕц¶Ёґ«КдКэѕЭµД·ЅПт(КЗ¶Б»№КЗРґ)ЎЈ
I2CЧЬПЯЙПµДКэѕЭ(јґФЪSDAЙПґ«КдµДКэѕЭ)¶јКЗТФ8О»ЧЦЅЪґ«КдµДЈ¬ФЪЧЬПЯЙПґ«КдІЩЧчµД№эіМЦРЈ¬¶Ф·ўЛН»тЅУКХµДКэѕЭЧЦЅЪКэКЗГ»УРПЮЦЖµДЎЈI2CЧЬПЯЙПµДЦч/ґУЙи±ё·ўЛНКэѕЭЧЬКЗТФТ»ёцКэѕЭµДЧоёЯО»їЄКјґ«Кд(јґMSB·ЅКЅ)Ј¬ґ«КдНкТ»ёцЧЦЅЪєуЈ¬У¦ґрРЕєЕЅфЅУЖдєуЎЈ
¶юЎўI2CЧЬПЯЅУїЪМШРФ
9ёцНЁµА¶аЦчЎўґУI2CЧЬПЯЅУїЪЎЈЖдЦР8ёцНЁµАЧчОЄЖХНЁЅУїЪ(јґI2C0ЎўI2C1....)Ј¬1ёцНЁµАЧчОЄHDMIµДЧЁУГЅУїЪЎЈ
7О»µШЦ·ДЈКЅЎЈґ®РРЈ¬8О»µҐПт»тЛ«ПтµДКэѕЭґ«КдЎЈФЪ±кЧјДЈКЅЦРЈ¬ГїГлЧо¶аїЙТФґ«Кд100kО»Ј¬јґ12.5kBµДКэѕЭБїЎЈФЪїмЛЩДЈКЅЦРЈ¬ГїГлЧо¶аїЙТФґ«Кд400kО»Ј¬јґ50kBµДКэѕЭБїЎЈЦ§іЦЦч»ъ¶Л·ўЛНЎўЅУКХЈ¬ґУ»ъ¶Л·ўЛНЎўЅУКХІЩЧчЎЈЦ§іЦЦР¶ПєНІйСЇ·ЅКЅЎЈ
ИэЎўїтНј

ґУЙПНјїЙТФїґіцЈ¬4412Мṩ4ёцјДґжЖчАґНкіЙЛщУРµДIICІЩЧчЎЈSDAПЯЙПµДКэѕЭґУIICDSјДґжЖчѕ№эТЖО»јДґжЖч·ўіцЈ¬»тНЁ№эТЖО»јДґжЖчґ«ИлIICDSјДЖчЈ» IICADDјДґжЖчЦР±Јґж4412µ±ЧцґУ»ъК±µДµШЦ·Ј»IICCONЎўIICSTATБЅёцјДґжЖчУГАґїШЦЖ»т±кК¶ёчЦЦЧґМ¬Ј¬±ИИз СЎФс№¤Чч№¤ЧчДЈКЅЈ¬·ўіцSРЕєЕЎўPРЕєЕЈ¬ѕц¶ЁКЗ·с·ўіцACKРЕєЕЈ¬јмІвКЗ·сЅУКХµЅACKРЕєЕЎЈ
ЛДЎўI2CЧЬПЯЅУїЪІЩЧч
Хл¶Ф4412ґ¦АнЖчµДI2CЧЬПЯЅУїЪЈ¬ѕЯ±ё4ЦЦІЩЧчДЈКЅЈє
1 -- Цч»ъ·ўЛНДЈКЅ2 -- Цч»ъЅУКХДЈКЅ3 -- ґУ»ъ·ўЛНДЈКЅ4 -- ґУ»ъЅУКХДЈКЅ
ПВГжЅ«ГиКцХвР©ІЩЧчДЈКЅЦ®јдµД№¦ДЬ№ШПµЈє
0 ЎўКэѕЭУРР§РФ
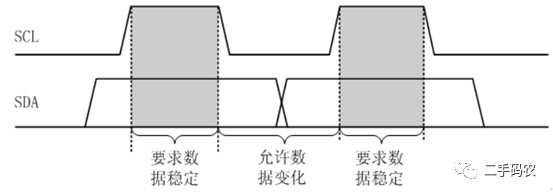
SDAПЯЙПµДКэѕЭ±ШРлФЪК±ЦУµДёЯµзЖЅЦЬЖЪ±ЈіЦОИ¶ЁЎЈКэѕЭПЯµДёЯ»тµНµзЖЅЧґМ¬IICО»ґ«КдКэѕЭµДУРР§РФФЪSCLПЯµДК±ЦУРЕєЕКЗµНµзЖЅІЕДЬёД±дЎЈ
1. їЄКјєННЈЦ№Мхјю
µ±4412µДI2CЅУїЪїХПРК±Ј¬ЛьНщНщ№¤ЧчФЪґУ»ъДЈКЅЎЈ»тХЯЛµЈ¬4412µДµДi2cЅУїЪФЪSDAПЯЙПІмѕхµЅТ»ёцЖрКјРЕєЕЦ®З°ЛьУ¦ёГ№¤ЧчФЪґУ»ъДЈКЅЎЈµ±їШЦЖЖчёД±д4412µДi2cЅУїЪµД№¤ЧчДЈКЅОЄЦч»ъДЈКЅєуЈ¬SDAПЯЙП·ўЖрКэѕЭґ«КдІўЗТїШЦЖЖч»бІъЙъSCLК±ЦУРЕєЕЎЈ
їЄКјМхјюНЁ№эSDAПЯЅшРРґ®РРµДЧЦЅЪґ«КдЈ¬Т»ёцНЈЦ№РЕєЕЦХЦ№КэѕЭґ«КдЈ¬НЈЦ№РЕєЕКЗЦёSCLФЪёЯµзЖЅЖчјюSDAПЯУРґУµНµЅёЯµзЖЅµДМш±дЈ¬Цч»ъ¶ЛІъЙъЖрКјєННЈЦ№МхјюЎЈµ±ЦчЎўґУЙи±ёІъЙъТ»ёцЖрКјРЕєЕєу,I2CЧЬПЯЅ«ЅшИлГ¦ЧґМ¬ЎЈХвАпРиТЄЛµГчµДКЗЙПКцЦчґУЙи±ё¶јУРїЙДЬЧчОЄЦч»ъ¶ЛЎЈ
µ±Т»ёцЦч»ъ·ўЛНБЛТ»ёцЖрКјРЕєЕєуЈ¬ЛьТІУ¦ёГ·ўЛНТ»ёцґУ»ъµШЦ·ТФНЁЦЄЧЬПЯЙПµДґУЙи±ёЎЈ ХвёцµШЦ·ЧЦЅЪµДµН7О»±нКѕґУЙи±ёµШЦ·Ј¬ЧоёЯО»±нКѕґ«КдКэѕЭµД·ЅПтЈ¬јґЦч»ъЅ«ТЄЅшРР¶Б»№КЗРґЎЈµ±ЧоёЯО»КЗ0К±Ј¬ЛьЅ«·ўЖрТ»ёцРґІЩЧч(·ўЛНІЩЧч)Ј»µ±ЧоёЯО»КЗ1К±Ј¬ЛьЅ«·ўЖрТ»ёц¶БКэѕЭµДЗлЗуЈЁЅУКХІЩЧчЈ©ЎЈ
Цч»ъ¶Л·ўЖрТ»ёцЅбКшРЕєЕТФНкіЙґ«КдІЩЧчЈ¬Из№ыЦч»ъ¶ЛПлФЪЧЬПЯЙПјМРшЅшРРКэѕЭµДґ«КдЈ¬ЛьЅ«·ўіцБнНвТ»ёцЖрКјРЕєЕєНґУЙи±ёµШЦ·ЎЈУГХвСщµД·ЅКЅЈ¬ЛьГЗїЙТФУГёчЦЦёчСщµДёсКЅЅшРР¶БРґІЩЧчЎЈ
ПВНјОЄЖрКјєННЈЦ№РЕєЕЈє

2. КэѕЭґ«КдёсКЅ
·ЕµЅSDAПЯЙПµДЛщУРЧЦЅЪКэѕЭµДі¤¶ИУ¦ёГОЄ8О»Ј¬ФЪГїґОґ«КдКэѕЭК±Ј¬¶Фґ«КдКэѕЭБїГ»УРПЮЦЖЎЈФЪЖрКјРЕєЕєуµДµЪТ»ёцКэѕЭЧЦЅЪУ¦ёГ°ьє¬µШЦ·ЧЦ¶ОЈ¬µ±4412µДI2CЅУїЪ±»ЙиЦГОЄЦчДЈКЅК±Ј¬µШЦ·ЧЦЅЪУ¦ёГУЙїШЦЖЖч¶Л·ўіцЎЈФЪГїёцЧЦЅЪєуЈ¬У¦ёГУРТ»ёцУ¦ґрО»ЎЈ
Из№ыґУ»ъТЄНкіЙТ»Р©ЖдЛы№¦ДЬєуЈЁАэИзТ»ёцДЪІїЦР¶П·юОсіМРтЈ©ІЕДЬјМРшЅУКХ»т·ўЛНПВТ»ёцЧЦЅЪЈ¬ґУ»ъїЙТФАµНSCLЖИК№Цч»ъЅшИлµИґэЧґМ¬ЎЈµ±ґУ»ъЧј±ёєГЅУКХПВТ»ёцКэѕЭІўКН·ЕSCLєуЈ¬КэѕЭґ«КдјМРшЎЈИз№ыЦч»ъФЪґ«КдКэѕЭЖЪјдТІРиТЄНкіЙТ»Р©ЖдЛы№¦ДЬЈЁАэИзТ»ёцДЪІїЦР¶П·юОсіМРтЈ©ТІїЙТФАµНSCLТФХјЧЎЧЬПЯЎЈ
ПВГжµДНјЦРЅ«ЛµГчКэѕЭґ«КдёсКЅЈє

ЙПНјЦРЛµГчЈ¬ФЪґ«КдНкГїёцЧЦЅЪКэѕЭєуЈ¬¶ј»бУРТ»ёцУ¦ґрРЕєЕЈ¬ХвёцУ¦ґрРЕєЕФЪµЪ9ёцК±ЦУЦЬЖЪЎЈѕЯМе№эіМИзПВ(ЧўТвПВГжГиКцµД¶БРґ№эіМ¶јКЗХл¶Ф 4412ґ¦АнЖч¶шСФЈ¬µ±УРѕЯМеµДI2CЙи±ёУл4412ПаБ¬К±Ј¬КэѕЭ±нКѕКІГґРиТЄїґѕЯМеµДI2CЙи±ёЈ¬4412КЗІ»ЦЄµАКэѕЭµДє¬ТеµД)Јє
Рґ№эіМЈє Цч»ъ·ўЛНТ»ёцЖрКјРЕєЕSЎъ·ўЛНґУ»ъ7О»µШЦ·єН1О»·ЅПтЈ¬·ЅПтО»±нКѕРґЎъЦч»ъКН·ЕSDAПЯ·Ѕ±гґУ»ъёш»ШУ¦ЎъУРґУ»ъЖҐЕдµЅµШЦ·Ј¬АµНSDAПЯЧчОЄACKЎъЦч»ъЦШРВ»сµГSDAґ«Кд8О»КэѕЭЎъЦч»ъКН·ЕSDAПЯ·Ѕ±гґУ»ъёш»ШУ¦ЎъґУ»ъКХµЅКэѕЭАµНSDAПЯЧчОЄACKёжЛЯЦч»ъКэѕЭЅУКХіЙ№¦ЎъЦч»ъ·ўіцНЈЦ№РЕєЕЎЈ
¶Б№эіМЈє Цч»ъ·ўЛНТ»ёцЖрКјРЕєЕSЎъ·ўЛНґУ»ъ7О»µШЦ·єН1О»·ЅПтЈ¬·ЅПтО»±нКѕ¶БЎъЦч»ъКН·ЕSDAПЯ·Ѕ±гґУ»ъёш»ШУ¦ЎъУРґУ»ъЖҐЕдµЅµШЦ·Ј¬АµНSDAПЯЧчОЄACKЎъґУ»ъјМРшХјУГSDAПЯЈ¬УГSDAґ«Кд8О»КэѕЭёшЦч»ъЎъґУ»ъКН·ЕSDAПЯ(АёЯ)·Ѕ±гЦч»ъёш»ШУ¦ЎъЦч»ъЅУКХµЅКэѕЭЎъЦч»ъ»сµГSDAПЯїШЦЖІўАµНSDAПЯЧчОЄACKёжЛЯґУ»ъКэѕЭЅУКХіЙ№¦ЎъЦч»ъ·ўіцНЈЦ№РЕєЕЎЈЧўТвЈєФЪѕЯМеµДI2CНЁРЕК±Ј¬ТЄїґI2CЙи±ёІЕДЬИ·¶Ё¶БРґК±РтЈ¬±ИИзПВГжјґЅ«ГиКцµДµЪЖЯґуµгЦРµДКѕАэЈ¬¶БРґEEPROMЦРѕН»бЛµµАѕЯМеµДКэѕЭє¬ТеЈ¬¶БРґ№эіМЎЈ
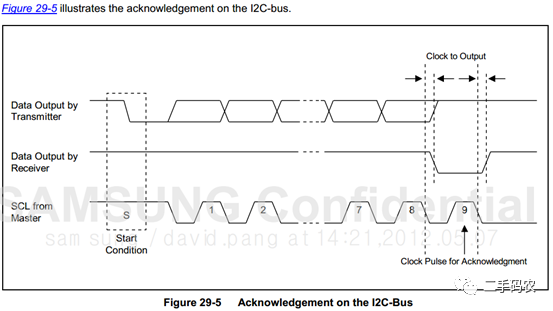
3. У¦ґрРЕєЕµДґ«Кд
ОЄБЛНкіЙТ»ёцЧЦЅЪКэѕЭµДґ«КдЈ¬ЅУКХ·ЅЅ«·ўЛНТ»ёцУ¦ґрО»ёш·ўЛН·ЅЎЈУ¦ґрРЕєЕіцПЦФЪSCLПЯЙПµДК±ЦУЦЬЖЪЦРµДµЪѕЕёцК±ЦУЦЬЖЪЈ¬ОЄБЛ·ўЛН»тЅУКХ1ёцЧЦЅЪµДКэѕЭЈ¬Цч»ъ¶Л»бІъЙъ8ёцК±ЦУЦЬЖЪЈ¬ОЄБЛґ«КдТ»ёцACKО»Ј¬Цч»ъ¶ЛРиТЄІъЙъТ»ёцК±ЦУВціеЎЈ
ACKК±ЦУВціеµЅАґЦ®јКЈ¬·ўЛН·Ѕ»бФЪSDAПЯЙПЙиЦГёЯµзЖЅТФКН·ЕSDAПЯЎЈФЪACKК±ЦУВціеЦ®јдЈ¬ЅУКХ·Ѕ»бЗэ¶ЇєН±ЈіЦSDAПЯОЄµНµзЖЅЈ¬Хв·ўЙъФЪµЪ9ёцК±ЦУВціеОЄёЯµзЖЅЖЪјдЎЈУ¦ґрРЕєЕОЄµНµзЖЅК±Ј¬№ж¶ЁОЄУРР§У¦ґрО»ЈЁACKјтіЖУ¦ґрО»Ј©Ј¬±нКѕЅУКХЖчТСѕіЙ№¦µШЅУКХБЛёГЧЦЅЪЈ»У¦ґрРЕєЕОЄёЯµзЖЅК±Ј¬№ж¶ЁОЄ·ЗУ¦ґрО»ЈЁNACKЈ©Ј¬Т»°г±нКѕЅУКХЖчЅУКХёГЧЦЅЪГ»УРіЙ№¦ЎЈ¶ФУЪ·ґАЎУРР§У¦ґрО»ACKµДТЄЗуКЗЈ¬ЅУКХЖчФЪµЪ9ёцК±ЦУВціеЦ®З°µДµНµзЖЅЖЪјдЅ«SDAПЯАµНЈ¬ІўЗТИ·±ЈФЪёГК±ЦУµДёЯµзЖЅЖЪјдОЄОИ¶ЁµДµНµзЖЅЎЈИз№ыЅУКХЖчКЗЦчїШЖчЈ¬ФтФЪЛьКХµЅЧоєуТ»ёцЧЦЅЪєуЈ¬·ўЛНТ»ёцNACKРЕєЕ(јґІ»·ўіцACKРЕєЕ)Ј¬ТФНЁЦЄ±»їШ·ўЛНЖчЅбКшКэѕЭ·ўЛНЈ¬ІўКН·ЕSDAПЯЈ¬ТФ±гЦчїШЅУКХЖч·ўЛНТ»ёцНЈЦ№РЕєЕPЎЈ
4. ¶БРґІЩЧч
µ±I2CїШЦЖЖчФЪ·ўЛНДЈКЅПВ·ўЛНКэѕЭєуЈ¬I2CЧЬПЯЅУїЪЅ«µИґэЦ±µЅТЖО»јДґжЖч(I2CDS)ЅУКХµЅТ»ёцКэѕЭЎЈФЪНщґЛјДґжЖчРґИлТ»ёцРВКэѕЭЗ°Ј¬SCLПЯУ¦ёГ±ЈіЦОЄµНµзЖЅЈ¬РґНкКэѕЭєуЈ¬I2CїШЦЖЖчЅ«КН·ЕSCLПЯЎЈµ±З°ХэФЪґ«КдµДКэѕЭґ«КдНкіЙєуЈ¬4412»бІ¶ЧЅµЅТ»ёцЦР¶ПЈ¬И»єуcpuЅ«їЄКјНщI2CDSјДґжЖчЦРРґИлТ»ёцРВµДКэѕЭЎЈ
µ±I2CїШЦЖЖчФЪЅУКХДЈКЅПВЅУКХµЅКэѕЭєуЈ¬I2CЧЬПЯЅУїЪЅ«µИґэЦ±µЅI2CDSјДґжЖч±»¶БЎЈФЪ¶БµЅРВКэѕЭЦ®З°Ј¬SCLПЯ»б±»±ЈіЦОЄµНµзЖЅЈ¬¶БµЅКэѕЭєуI2CїШЦЖЖчЅ«КН·ЕµфSCLПЯЎЈТ»ёцРВКэѕЭЅУКХНкіЙєуЈ¬4412Ѕ«КХµЅТ»ёцЦР¶ПЈ¬cpuКХµЅХвёцЦР¶ПЗлЗуєуЈ¬ЛьЅ«ґУI2CDSјДґжЖчЦР¶БИЎКэѕЭЎЈ
5. ЧЬПЯЦЩІГ»ъЦЖ
ЧЬПЯЙПїЙДЬ№ТЅУУР¶аёцЖчјюЈ¬УРК±»б·ўЙъБЅёц»т¶аёцЦчЖчјюН¬К±ПлХјУГЧЬПЯµДЗйїцЈ¬ХвЦЦЗйїцЅРЧцЧЬПЯѕєХщЎЈI2CЧЬПЯѕЯУР¶аЦчїШДЬБ¦Ј¬їЙТФ¶Ф·ўЙъФЪSDAПЯЙПµДЧЬПЯѕєХщЅшРРЦЩІГЈ¬ЖдЦЩІГФФтКЗХвСщµДЈєµ±¶аёцЦчЖчјюН¬К±ПлХјУГЧЬПЯК±Ј¬Из№ыДіёцЦчЖчјю·ўЛНёЯµзЖЅЈ¬¶шБнТ»ёцЦчЖчјю·ўЛНµНµзЖЅЈ¬Фт·ўЛНµзЖЅУлґЛК±SDAЧЬПЯµзЖЅІ»·ыµДДЗёцЖчјюЅ«ЧФ¶Ї№Ш±ХЖдКдіцј¶ЎЈЧЬПЯѕєХщµДЦЩІГКЗФЪБЅёцІгґОЙПЅшРРµДЎЈКЧПИКЗµШЦ·О»µД±ИЅПЈ¬Из№ыЦчЖчјюС°Ц·Н¬Т»ёцґУЖчјюЈ¬ФтЅшИлКэѕЭО»µД±ИЅПЈ¬ґУ¶шИ·±ЈБЛѕєХщЦЩІГµДїЙїїРФЎЈУЙУЪКЗАыУГI2CЧЬПЯЙПµДРЕПўЅшРРЦЩІГЈ¬ТтґЛІ»»бФміЙРЕПўµД¶ЄК§ЎЈ
6. ЦХЦ№Мхјю
µ±Т»ёцґУЅУКХХЯІ»ДЬК¶±рґУµШЦ·К±Ј¬ЛьЅ«±ЈіЦSDAПЯОЄёЯµзЖЅ ЎЈФЪХвСщµДЗйїцПВЈ¬Цч»ъ»бІъЙъТ»ёцНЈЦ№РЕєЕІўЗТИЎПыКэѕЭµДґ«КдЎЈµ±ЦХЦ№ґ«КдІъЙъєуЈ¬Цч»ъ¶ЛЅУКХЖч»бНЁ№эИЎПыACKµДІъЙъТФёжЛЯґУ»ъ¶Л·ўЛНЖчЅбКш·ўЛНІЩЧчЎЈХвЅ«ФЪЦч»ъ¶ЛЅУКХЖчЅУКХµЅґУ»ъ¶Л·ўЛНЖч·ўЛНµДЧоєуТ»ёцЧЦЅЪЦ®єу·ўЙъЈ¬ОЄБЛИГЦч»ъ¶ЛІъЙъТ»ёцНЈЦ№МхјюЈ¬ґУ»ъ¶Л·ўЛНХЯЅ«КН·ЕSDAПЯЎЈ
7. ЕдЦГI2CЧЬПЯ
Из№ыТЄЙиЦГI2CЧЬПЯЦРSCLК±ЦУРЕєЕµДЖµВКЈ¬їЙТФФЪI2CCONјДґжЖчЦРЙиЦГ4О»·ЦЖµЖчµДЦµЎЈI2CЧЬПЯЅУїЪµШЦ·Цµґж·ЕФЪI2CЧЬПЯµШЦ·јДґжЖч(I2CADD)ЦРЈ¬Д¬ИПЦµОґЦЄЎЈ
8. ГїЦЦДЈКЅПВµДІЩЧчБчіМНј
ФЪI2CЧЬПЯЙПЦґРРИОєОµДКХ·ўTx/RxІЩЧчЗ°Ј¬У¦ёГЧцИзПВЕдЦГЈєЈЁ1Ј©ФЪI2CADDјДґжЖчЦРРґИлґУЙи±ёµШЦ·ЈЁ2Ј©ЙиЦГI2CCONїШЦЖјДґжЖч a. К№ДЬЦР¶П b. ¶ЁТеSCLЖµВКЈЁ3Ј©ЙиЦГI2CSTATјДґжЖчТФК№ДЬґ®РРКдіц
ПВНјОЄЦчЙи±ё·ўЛНДЈКЅ
ПВНјОЄЦчЙи±ёЅУКХДЈКЅ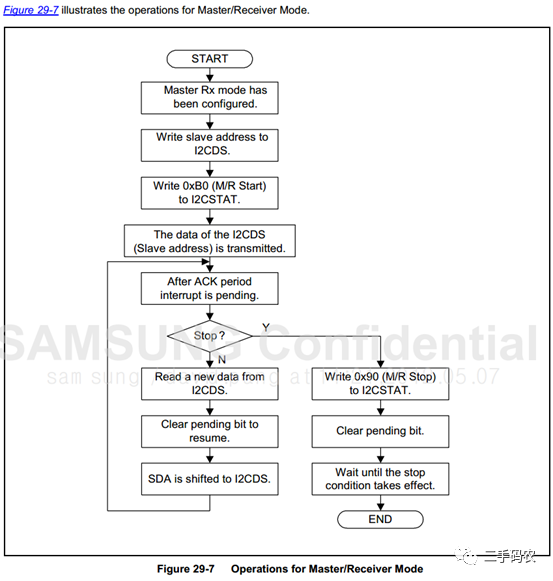
ПВНјОЄґУЙи±ё·ўЛНДЈКЅ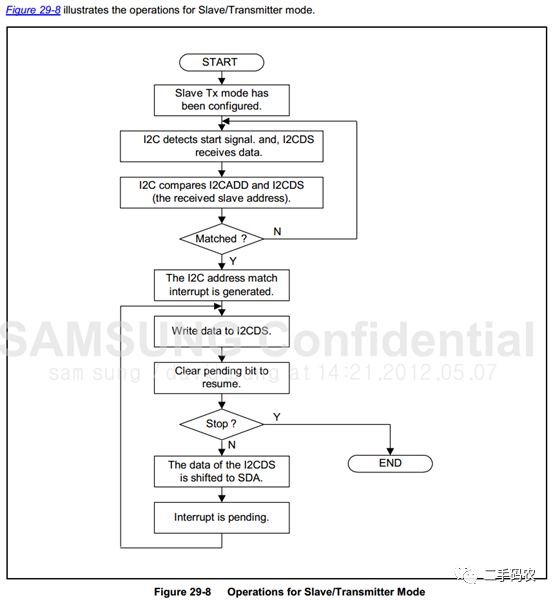
[size=0.32]ПВНјОЄґУЙи±ёЅУКХ [size=0.32]ДЈКЅ [size=0.32] 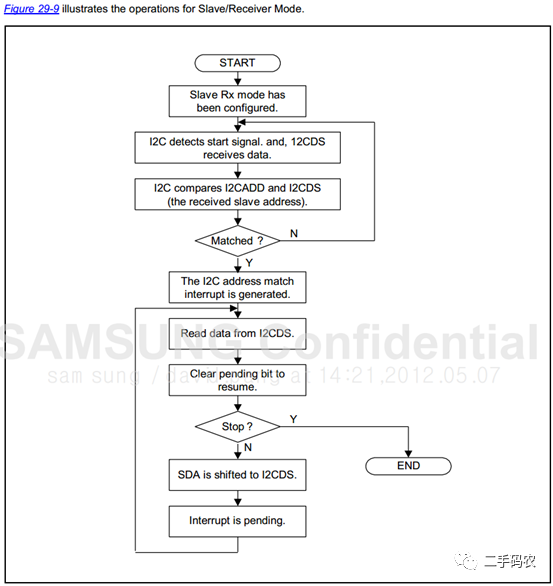
[size=0.32]1-- I2CЧЬПЯїШЦЖјДґжЖч [size=0.32]
[size=0.32]IICCONјДґжЖчУГУЪїШЦЖКЗ·с·ўіцACKРЕєЕЎўЙиЦГ·ўЛНЖчµДК±ЦУЎўїЄЖфI2CЦР¶ПЈ¬Іў±кК¶ЦР¶ПКЗ·с·ўЙъ
[size=0.32] 
[size=0.32]К№УГIICCONјДґжЖчК±Ј¬УРИзПВЧўТвКВПо
[size=0.32]1Ј©Ўў·ўЛНДЈКЅµДК±ЦУЖµВКУЙО»[6]ЎўО»[3:0]БЄєПѕц¶ЁЎЈБнНвЈ¬µ±IICCON[6]=0К±Ј¬IICCON[3:0]І»ДЬИЎ0»т1ЎЈ [size=0.32]2Ј©ЎўО»[4]УГАґ±кК¶КЗ·сУРI2CЦР¶П·ўЙъЈ¬¶БіцОЄ0К±±кК¶Г»УРЦР¶П·ўЙъЈ¬¶БіцОЄ1К±±кК¶УРЦР¶П·ўЙъЎЈµ±ґЛО»ОЄ1К±Ј¬SCLПЯ±»АµНЈ¬ґЛК±ЛщТФI2Cґ«КдНЈЦ№;Из№ыТЄјМРшґ«КдЈ¬РиРґИл0ЗеіэЛьЎЈ [size=0.32]ЦР¶ПФЪТФПВ3ЦЦЗйїцПВ·ўЙъЈє [size=0.32]1 -- µ±·ўЛНµШЦ·РЕПў»тЅУКХµЅТ»ёцґУ»ъµШЦ·ІўЗТОЗєПК±Ј» [size=0.32]2 -- µ±ЧЬПЯЦЩІГК§°ЬК±Ј» [size=0.32]3 -- µ±·ўЛН/ЅУКХНкТ»ёцЧЦЅЪµДКэѕЭЈЁ°ьАЁПмУ¦О»Ј©К±Ј» [size=0.32]3Ј©Ўў»щУЪSDAЎўSCLПЯЙПК±јдМШРФµДїјВЗЈ¬ТЄ·ўЛНКэѕЭК±Ј¬ПИЅ«КэѕЭРґИлIICDSјДґжЖчЈ¬И»єуФЩЗеіэЦР¶ПЎЈ [size=0.32]4Ј©ЎўИз№ыIICCON[5]=0Ј¬IICCON[4]Ѕ«І»ДЬХэіЈ№¤ЧчЈ¬ЛщТФЈ¬јґК№І»К№УГI2CЦР¶ПЈ¬ТІТЄЅ«IICCON[5]ЙиОЄ1.
[size=0.32]2 -- I2CЧґМ¬јДґжЖч
[size=0.32]IICSTATјДґжЖчУГУЪСЎФсI2CЅУїЪµД№¤ЧчДЈКЅЈ¬·ўіцSРЕєЕЎўPРЕєЕЈ¬К№ДЬЅУКХ/·ўЛН№¦ДЬЈ¬Іў±кК¶ёчЦЦЧґМ¬Ј¬±ИИзЧЬПЯЦЩІГКЗ·сіЙ№¦ЎўЧчОЄґУ»ъК±КЗ·с±»С°Ц·ЎўКЗ·сЅУКХµЅ0µШЦ·ЎўКЗ·сЅУКХµЅACKРЕєЕµИЎЈ [size=0.32] 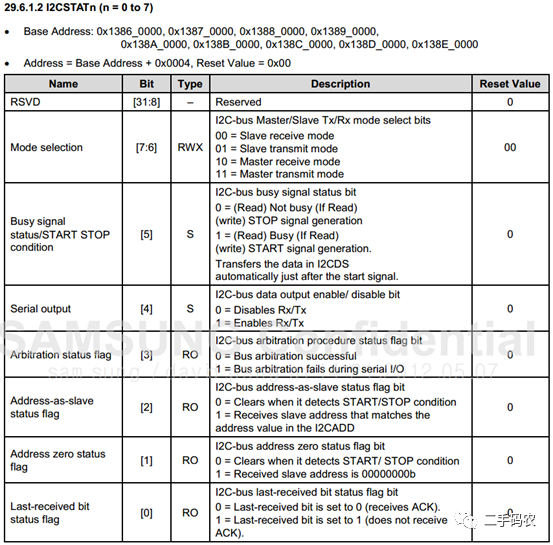
[size=0.32]3 -- I2CКэѕЭ·ўЛН/ЅУКХТЖО»јДґжЖч [size=0.32] 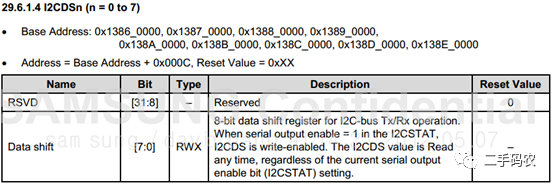
[size=0.32]fs4412µДi2cЧЬПЯЙП№ТФШБЛmpu6050 [size=0.32]mpu6050ГїґО¶БИЎ»тХЯТЄРґИлКэѕЭК±Ј¬±ШРлПИёжЦЄґУЙи±ёТЄІЩЧчµДДЪІїјДґжЖчµШЦ·ЈЁRAЈ©Ј¬И»єуЅфёъЧЕ¶БИЎ»тХЯРґИлКэѕЭЈЁDATAЈ©Ј¬ДЪІїјДґжЖчµДЕдЦГєН¶БИЎТ»ґОЧо¶а1ёцdataЈ¬Ѕ»»ҐК±РтИзПВЈє [size=0.32] 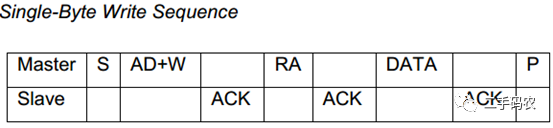
[size=0.32] 
[size=0.32]ЎѕЧўТвЎїЙПКцБЅёцК±Рт·ЗіЈЦШТЄЈ¬єуРшОТГЗТЄ±аРґ»щУЪlinuxµДЗэ¶Ї±аРґi2c_msgТІТЄ»щУЪЙПКцК±РтАґКµПЦЎЈ
[size=0.32] 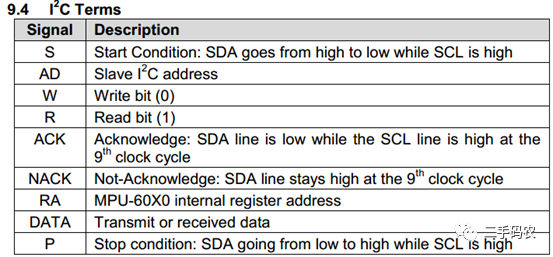 [size=0.32]
[size=0.32]ЎѕјДґжЖчК№УГ№жФтЎї [size=0.32]
[size=0.32]ПВГжПИМбЗ°ЅІТ»ПВѕЯМеУ¦УГЦРИзєОЖф¶ЇєН»ЦёґIICµДґ«Кд
[size=0.32]Жф¶Ї»т»Цёґ4412µДI2Cґ«КдУРТФПВБЅЦЦ·Ѕ·ЁЎЈ
[size=0.32]1Ј© µ±IICCON[4]јґЦР¶ПЧґМ¬О»ОЄ0К±Ј¬НЁ№эРґIICSTATјДґжЖчЖф¶ЇI2CІЩЧчЎЈУРТФПВБЅЦЦЗйїцЎЈ [size=0.32]1--ФЪЦч»ъДЈКЅЈ¬ [size=0.32] БоIICSTAT[5:4]µИУЪ0b11Ј¬Ѕ«·ўіцSРЕєЕєНIICDSјДґжЖчµДКэѕЭЈЁС°Ц·Ј©Ј¬ [size=0.32] БоIICSTAT[5:4]µИУЪ0b01Ј¬Ѕ«·ўіцPРЕєЕЎЈ [size=0.32]2--ФЪґУ»ъДЈКЅЈ¬БоIICSTAT[4]µИУЪ1Ѕ«µИґэЖдЛыЦч»ъ·ўіцSРЕєЕј°µШЦ·РЕПўЎЈ
[size=0.32]2Ј©µ±IICCON[4]јґЦР¶ПЧґМ¬ОЄ1К±Ј¬±нКѕI2CІЩЧч±»ФЭНЈЎЈФЪХвЖЪјдЙиЦГєГЖдЛыјДґжЖчЦ®єуЈ¬ПтIICCON[4]РґИл0јґїЙ»ЦёґI2CІЩЧчЎЈЛщОЅЎ°ЙиЦГЖдЛыјДґжЖчЎ±Ј¬УРТФПВИэЦЦЗйїцЈє [size=0.32]1--¶ФУЪЦч»ъДЈКЅЈ¬їЙТФ°ґХХЙПГж1µД·Ѕ·ЁРґIICSTATјДґжЖчЈ¬»ЦёґI2CІЩЧчєујґїЙ·ўіцSРЕєЕєНIICDSјДґжЖчµДЦµЈЁС°Ц·Ј©Ј¬»т·ўіцPРЕєЕЎЈ [size=0.32]2--¶ФУЪ·ўЛНЖчЈ¬їЙТФЅ«ПВТ»ёцТЄ·ўЛНµДКэѕЭРґИлIICDSјДґжЖчЦРЈ¬»ЦёґI2CІЩЧчєујґїЙ·ўіцХвёцКэѕЭЎЈ [size=0.32]3--¶ФУЪЅУКХЖчЈ¬їЙТФґУIICDSјДґжЖч¶БіцЅУКХµЅµДКэѕЭЎЈЧоєуПтIICCON[4]РґИл0µДН¬К±Ј¬ЙиЦГIICCON[7]ТФѕц¶ЁКЗ·сФЪЅУКХµЅПВТ»ёцКэѕЭєуКЗ·с·ўіцACKРЕєЕЎЈ
[size=0.32]ЎѕMPU6050УІјюµзВ·НјЎї(КµјК°еЧУµзВ·НјІ»Т»¶ЁєНПВГжТ»СщЈ¬ѕЯМеОКМвѕЯМе·ЦОцЈ¬±ѕАэІОїјexynos-fs4412їЄ·ў°е) [size=0.32]  [size=0.32]1 AD0ЅУµШµД ЦµОЄ 0 [size=0.32]  [size=0.32]ЛщТФґУЙи±ёµШЦ·ОЄ0x86 [size=0.32]2 SCLЎўSDAБ¬ЅУµДi2c_SCL5Ўўi2c_SDA5 [size=0.32]  [size=0.32]УЙґЛїЙµГХвБЅёцРЕєЕПЯёґУГБЛGPIOµДGPBµД2Ўў3ТэЅЕ [size=0.32]3 ІйФДexynos4412 datasheet 6.2.2 Part 1їЙµГ [size=0.32]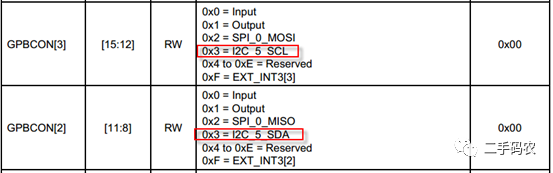 [size=0.32]ЛщТФЙиЦГGPIO µД GPB Ўѕ15Јє8Ўї= 0x33 јґїЙ
[size=0.32]ПВГжКЗёцIICЧЬПЯКµАэЈє [size=0.32] УГIICЧЬПЯКµПЦCPUУлMPU-6050µДКэѕЭІйСЇ [size=0.32]ѕЯМеґъВлИзПВЈє #include "exynos_4412.h"
//****************************************// MPU6050іЈУГДЪІїµШЦ·Ј¬ТФПВµШЦ·ФЪmpu6050ДЪІї//****************************************#define SMPLRT_DIV 0x19 //НУВЭТЗІЙСщВКЈ¬µдРНЦµЈє0x07(125Hz)#define CONFIG 0x1A //µННЁВЛІЁЖµВКЈ¬µдРНЦµЈє0x06(5Hz)#define GYRO_CONFIG 0x1B //НУВЭТЗЧФјмј°ІвБї·¶О§Ј¬µдРНЦµЈє0x18(І»ЧФјмЈ¬2000deg/s)#define ACCEL_CONFIG 0x1C //јУЛЩјЖЧФјмЎўІвБї·¶О§ј°ёЯНЁВЛІЁЖµВКЈ¬µдРНЦµЈє0x01(І»ЧФјмЈ¬2GЈ¬5Hz)#define ACCEL_XOUT_H 0x3B#define ACCEL_XOUT_L 0x3C#define ACCEL_YOUT_H 0x3D#define ACCEL_YOUT_L 0x3E#define ACCEL_ZOUT_H 0x3F#define ACCEL_ZOUT_L 0x40#define TEMP_OUT_H 0x41#define TEMP_OUT_L 0x42#define GYRO_XOUT_H 0x43#define GYRO_XOUT_L 0x44#define GYRO_YOUT_H 0x45#define GYRO_YOUT_L 0x46#define GYRO_ZOUT_H 0x47#define GYRO_ZOUT_L 0x48#define PWR_MGMT_1 0x6B //µзФґ№ЬАнЈ¬µдРНЦµЈє0x00(ХэіЈЖфУГ)#define WHO_AM_I 0x75 //IICµШЦ·јДґжЖч(Д¬ИПКэЦµ0x68Ј¬Ц»¶Б)#define SlaveAddress 0xD0 //IICРґИлК±µДµШЦ·ЧЦЅЪКэѕЭЈ¬+1ОЄ¶БИЎ
void mydelay_ms(int time){int i, j;while(time--){for (i = 0; i < 5; i++)for (j = 0; j < 514; j++);}}/********************************************************************** * @brief iic read a byte program body * @param[in] slave_addr, addr, &data * @return None **********************************************************************/void iic_read(unsigned char slave_addr, unsigned char addr, unsigned char *data){/*ёщѕЭmpu6050µДdatasheetЈ¬ТЄ¶БИЎКэѕЭ±ШРлПИЦґРРРґІЩЧчЈєРґИлТ»ёцґУЙи±ёµШЦ·Ј¬
И»єуЦґРР¶БІЩЧчЈ¬ІЕДЬ¶БИЎµЅёГДЪІїјДґжЖчµДДЪИЭ*/
I2C5.I2CDS = slave_addr; //Ѕ«ґУ»ъµШЦ·РґИлI2CDSјДґжЖчЦРI2C5.I2CCON = (1 << 7)|(1 << 6)|(1 << 5); //ЙиЦГК±ЦУІўК№ДЬЦР¶ПI2C5.I2CSTAT = 0xf0; //[7:6]ЙиЦГОЄ0b11Ј¬Цч»ъ·ўЛНДЈКЅЈ»//Нщ[5Јє4]О»Рґ0b11Ј¬јґІъЙъЖф¶ЇРЕєЕ,·ўіцIICDSјДґжЖчЦРµДµШЦ·
while(!(I2C5.I2CCON & (1 << 4))); // µИґэґ«КдЅбКшЈ¬ґ«КдЅбКшєуЈ¬I2CCON [4]О»ОЄ1Ј¬±кК¶УРЦР¶П·ўЙъЈ» // ґЛО»ОЄ1К±Ј¬SCLПЯ±»АµНЈ¬ґЛК±I2Cґ«КдНЈЦ№Ј»I2C5.I2CDS = addr; //РґГьБоЦµI2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));// I2CCON [4]О»Зе0Ј¬јМРшґ«Кд
while(!(I2C5.I2CCON & (1 << 4)));// µИґэґ«КдЅбКшI2C5.I2CSTAT = 0xD0; // I2CSTAT[5:4]О»Рґ0b01,·ўіцНЈЦ№РЕєЕ
I2C5.I2CDS = slave_addr | 1; //±нКѕТЄ¶БіцКэѕЭI2C5.I2CCON = (1 << 7)|(1 << 6) |(1 << 5) ; //ЙиЦГК±ЦУІўК№ДЬЦР¶ПI2C5.I2CSTAT = 0xb0;//[7:6]О»0b10,Цч»ъЅУКХДЈКЅЈ»
//Нщ[5Јє4]О»Рґ0b11Ј¬јґІъЙъЖф¶ЇРЕєЕ,·ўіцIICDSјДґжЖчЦРµДµШЦ·
// I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4)); Из№ыЗїРР№Ш±ХЈ¬Ѕ«¶БИЎІ»µЅКэѕЭ
while(!(I2C5.I2CCON & (1 << 4)));//µИґэґ«КдЅбКшЈ¬ЅУКХКэѕЭ
I2C5.I2CCON &= ~((1<<7)|(1 << 4));/* Resume the operation & no ack*/ // I2CCON [4]О»Зе0Ј¬јМРшґ«КдЈ¬ЅУКХКэѕЭЈ¬
// Цч»ъЅУКХЖчЅУКХµЅЧоєуТ»ЧЦЅЪКэѕЭєуЈ¬І»·ўіцУ¦ґрРЕєЕ no ack // ґУ»ъ·ўЛНЖчКН·ЕSDAПЯЈ¬ТФФКРнЦч»ъ·ўіцPРЕєЕЈ¬НЈЦ№ґ«КдЈ»
while(!(I2C5.I2CCON & (1 << 4)));// µИґэґ«КдЅбКш
I2C5.I2CSTAT = 0x90;*data = I2C5.I2CDS;I2C5.I2CCON &= ~(1<<4); /*clean interrupt pending bit */
mydelay_ms(10);*data = I2C5.I2CDS;
}/********************************************************************** * @brief iic write a byte program body * @param[in] slave_addr, addr, data * @return None **********************************************************************/void iic_write (unsigned char slave_addr, unsigned char addr, unsigned char data){I2C5.I2CDS = slave_addr;I2C5.I2CCON = (1 << 7)|(1 << 6)|(1 << 5) ;I2C5.I2CSTAT = 0xf0;while(!(I2C5.I2CCON & (1 << 4)));
I2C5.I2CDS = addr;I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));while(!(I2C5.I2CCON & (1 << 4)));
I2C5.I2CDS = data;I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));while(!(I2C5.I2CCON & (1 << 4)));
I2C5.I2CSTAT = 0xd0;I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));mydelay_ms(10);
}
void MPU6050_Init (){iic_write(SlaveAddress, PWR_MGMT_1, 0x00);iic_write(SlaveAddress, SMPLRT_DIV, 0x07);iic_write(SlaveAddress, CONFIG, 0x06);iic_write(SlaveAddress, GYRO_CONFIG, 0x18);iic_write(SlaveAddress, ACCEL_CONFIG, 0x01);}/*¶БИЎmpu6050ДіёцДЪІїјДґжЖчµДДЪИЭ*/int get_data(unsigned char addr){char data_h, data_l;iic_read(SlaveAddress, addr, &data_h);iic_read(SlaveAddress, addr+1, &data_l);return (data_h<<8)|data_l;}
/* * Вг»ъґъВлЈ¬І»Н¬УЪLINUX У¦УГІгЈ¬ Т»¶ЁјУС»·їШЦЖ */int main(void){int data;
unsigned char zvalue;GPB.CON = (GPB.CON & ~(0xff<<8)) | 0x33<<8; // GPBCON[3], I2C_5_SCL GPBCON[2], I2C_5_SDAmydelay_ms(100);uart_init();
/*---------------------------------------------------------------------*/I2C5.I2CSTAT = 0xD0;I2C5.I2CCON &= ~(1<<4); /*clean interrupt pending bit *//*---------------------------------------------------------------------*/
mydelay_ms(100);MPU6050_Init();mydelay_ms(100);
printf("\n********** I2C test!! ***********\n");
while(1){//Turn on
data = get_data(GYRO_ZOUT_H);printf(" GYRO --> Z <---:Hex: %x", data);data = get_data(GYRO_XOUT_H);printf(" GYRO --> X <---:Hex: %x", data);printf("\n");mydelay_ms(1000);}return 0;}КµСйЅб№ыИзПВЈє********** I2C test!! *********** GYRO --> Z <---:Hex: 1c GYRO --> X <---:Hex: feda GYRO --> Z <---:Hex: fefc GYRO --> X <---:Hex: fed6 GYRO --> Z <---:Hex: fefe GYRO --> X <---:Hex: fed6 GYRO --> Z <---:Hex: fefe GYRO --> X <---:Hex: fedc GYRO --> Z <---:Hex: fefe GYRO --> X <---:Hex: feda GYRO --> Z <---:Hex: fefc GYRO --> X <---:Hex: fed6 GYRO --> Z <---:Hex: fefe GYRO --> X <---:Hex: feda GYRO --> Z <---:Hex: fcf2 GYRO --> X <---:Hex: 202 GYRO --> Z <---:Hex: ec GYRO --> X <---:Hex: faa0 GYRO --> Z <---:Hex: 4c GYRO --> X <---:Hex: e GYRO --> Z <---:Hex: fe GYRO --> X <---:Hex: fed8 GYRO --> Z <---:Hex: 0 GYRO --> X <---:Hex: fede GYRO --> Z <---:Hex: 0 GYRO --> X <---:Hex: feda
[size=0.32]¶БРґІЩЧчґъВлЅвОцЈє [size=0.32]РґИлТ»ёцКэѕЭБчіМ [size=0.32]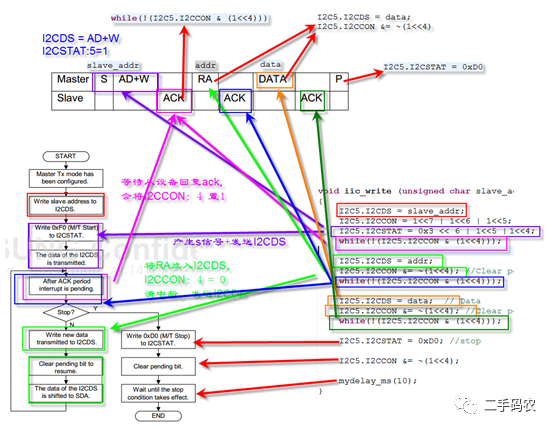 [size=0.32]¶БКэѕЭБчіМ [size=0.32]
02Зэ¶ЇЖЄ-Ц®»щУЪlinuxµДmpu6050Зэ¶Ї
±ѕОДТФИэРЗ exynos4412ОЄАэЅІЅвmpu6050НУВЭТЗµДКэѕЭ¶БИЎЗэ¶ЇµДКµПЦЎЈНЁ№э±ѕЖЄОДХВЈ¬¶БХЯїЙТФХЖОХ»щУЪLinuxЗэ¶ЇI2C±аРґ·Ѕ·ЁЎЈ
I2C єЛРДЈЁi2c_coreЈ©
I2CєЛРДО¬»¤БЛ i2c_busЅб№№МеЈ¬МṩБЛI2CЧЬПЯЗэ¶ЇєНЙи±ёЗэ¶ЇµДЧўІбЎўЧўПъ·Ѕ·ЁЈ¬О¬»¤БЛI2CЧЬПЯµДЗэ¶ЇЎўЙи±ёБґ±нЈ¬КµПЦБЛЙи±ёЎўЗэ¶ЇµДЖҐЕдМЅІвЎЈґЛІї·ЦґъВлУЙLinuxДЪєЛМṩЎЈ
I2C ЧЬПЯЗэ¶Ї
I2CЧЬПЯЗэ¶ЇО¬»¤БЛI2CККЕдЖчКэѕЭЅб№№ЈЁi2c_adapterЈ©єНККЕдЖчµДНЁРЕ·Ѕ·ЁКэѕЭЅб№№ЈЁi2c_algorithmЈ©ЎЈЛщТФI2CЧЬПЯЗэ¶ЇїЙїШЦЖI2CККЕдЖчІъЙъstartЎўstopЎўACKµИЎЈґЛІї·ЦґъВлУЙѕЯМеµДРѕЖ¬і§ЙММṩЈ¬±ИИзSamsungЎўёЯНЁЎЈ
I2C Йи±ёЗэ¶Ї
I2CЙи±ёЗэ¶ЇЦчТЄО¬»¤БЅёцЅб№№МеЈєi2c_driverєНi2c_clientЈ¬КµПЦєНУГ»§Ѕ»»ҐµДОДјюІЩЧчјЇєПfopsЎўcdevµИЎЈґЛІї·ЦґъВлѕНКЗЗэ¶ЇїЄ·ўХЯРиТЄНкіЙµДЎЈ
Linux ДЪєЛЦРГиКцI2CµДЛДёцєЛРДЅб№№Ме
1Ј©i2c_clientЎЄ№ТФЪI2CЧЬПЯЙПµДI2CґУЙи±ё
ГїТ»ёцi2cґУЙи±ё¶јРиТЄУГТ»ёцi2c_clientЅб№№МеАґГиКцЈ¬i2c_client¶ФУ¦ХжКµµДi2cОпАнЙи±ёdeviceЎЈ
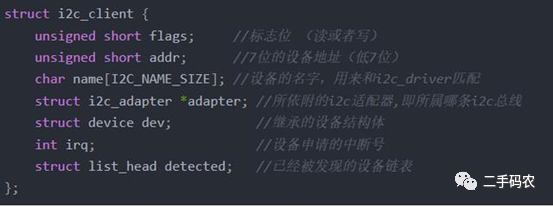
µ«КЗi2c_clientІ»КЗОТГЗЧФјєРґіМРтИҐґґЅЁµДЈ¬¶шКЗНЁ№эТФПВіЈУГµД·ЅКЅЧФ¶ЇґґЅЁµДЈє
·Ѕ·ЁТ»: ·ЦЕдЎўЙиЦГЎўЧўІбi2c_board_info·Ѕ·Ё¶ю: »сИЎadapterµчУГi2c_new_device·Ѕ·ЁИэ: НЁ№эЙи±ёКчЈЁdevicetreeЈ©ґґЅЁ
·Ѕ·Ё1єН·Ѕ·Ё2НЁ№эplatformґґЅЁЈ¬ХвБЅЦЦ·Ѕ·ЁФЪДЪєЛ3.0°ж±ѕТФЗ°К№УГЛщТФФЪХвІ»ПкПёЅйЙЬЈ»·Ѕ·Ё3КЗЧоРВµД·Ѕ·ЁЈ¬3.0°ж±ѕЦ®єуµДДЪєЛ¶јКЗНЁ№эХвЦЦ·ЅКЅґґЅЁµДЈ¬ОДХВєуГжµД°ёАэѕН°ґ·Ѕ·Ё3ЎЈ
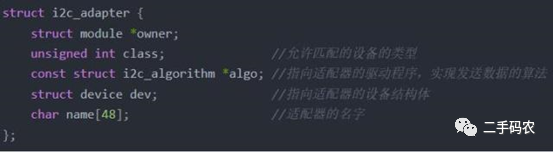
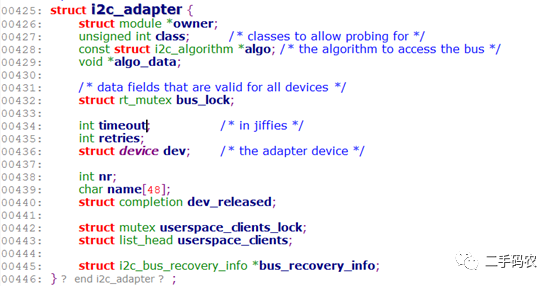
2Ј©i2c_adapter
I2CЧЬПЯККЕдЖчЈ¬јґsocЦРµДI2CЧЬПЯїШЦЖЖчЈ¬УІјюЙПГїТ»¶ФI2CЧЬПЯ¶ј¶ФУ¦Т»ёцККЕдЖчАґїШЦЖЛьЎЈФЪLinuxДЪєЛґъВлЦРЈ¬ГїТ»ёцadapterМṩБЛТ»ёцГиКцЛьµДЅб№№(struct i2c_adapter)Ј¬ФЩНЁ№эi2c coreІгЅ«i2cЙи±ёУлi2c adapter№ШБЄЖрАґЎЈЦчТЄУГАґНкіЙi2cЧЬПЯїШЦЖЖчПа№ШµДКэѕЭНЁРЕЈ¬ґЛЅб№№МеФЪРѕЖ¬і§ЙММṩµДґъВлЦРО¬»¤ЎЈ
3Ј©i2c_algorithm
I2CЧЬПЯКэѕЭНЁРЕЛг·ЁЈ¬НЁ№э№ЬАнI2CЧЬПЯїШЦЖЖчЈ¬КµПЦ¶ФI2CЧЬПЯЙПКэѕЭµД·ўЛНєНЅУКХµИІЩЧчЎЈТаїЙТФАнЅвОЄI2CЧЬПЯїШЦЖЖчЈЁККЕдЖчadapterЈ©¶ФУ¦µДЗэ¶ЇіМРтЈ¬ГїТ»ёцККЕдЖч¶ФУ¦Т»ёцЗэ¶ЇіМРтЈ¬УГАґГиКцККЕдЖчєНЙи±ёЦ®јдµДНЁРЕ·Ѕ·ЁЈ¬УЙРѕЖ¬і§ЙМИҐКµПЦµДЎЈ

4Ј©i2c_driver
УГУЪ№ЬАнI2CµДЗэ¶ЇіМРтєНi2cЙи±ёЈЁclientЈ©µДЖҐЕдМЅІвЈ¬КµПЦУлУ¦УГІгЅ»»ҐµДОДјюІЩЧчјЇєПfopsЎўcdevµИЎЈ

МоРґЙи±ёКчЅЪµгРЕПўЈє
УІјюµзВ·НјИзПВЈє


УЙЙПНјЛщКѕУІјюК№УГµДКЗI2CНЁµА5Ј¬

ІйХТexnos4412µДdatasheet 29.6.1ЅЪЈ¬¶ФУ¦µД»щµШЦ·ОЄ0x138B0000ЎЈ

УЙЙПНјїЙЦЄЦР¶ПТэЅЕёґУГµДКЗGPX3_3ЎЈ
ІОїјI2CЧоИ«ёЙ»х-ЈЁ1Ј©Вг»ъІЩЧчЖЄ Ј¬mpu6050ґУЙи±ёµШЦ·ОЄ0x68ЎЈ
ЧЫЙПЙи±ёКчЦРГиКцI2CЙи±ёРЕПў
i2c@138B0000 { »щµШЦ·КЗ 138B0000 samsung,i2c-sda-delay = <100>; samsung,i2c-max-bus-freq = <20000>; pinctrl-0 =<&i2c5_bus>; НЁµА5 pinctrl-names = "default"; status = "okay"; mpu6050-3-asix@68 { compatible = "invensense,mpu6050"; reg= <0x68>; ґУЙи±ёµШЦ· interrupt-parent = <&gpx3>; ЦР¶ПёёЅЪµг interrupts= <3 2>; ЦР¶Пindex=3Ј¬ЦР¶ПґҐ·ў·ЅКЅЈєПВЅµСШґҐ·ў }; };ЖдЦР НвГжЅЪµг i2c@138B0000{}КЗi2cїШЦЖЖчЙи±ёКчРЕПўЈ¬ЧУЅЪµг mpu6050-3-asix@68{}КЗґУЙи±ёmpu6050µДЙи±ёКчЅЪµгРЕПўЎЈ
Ѕб№№МеЦ®јд№ШПµИзПВЈє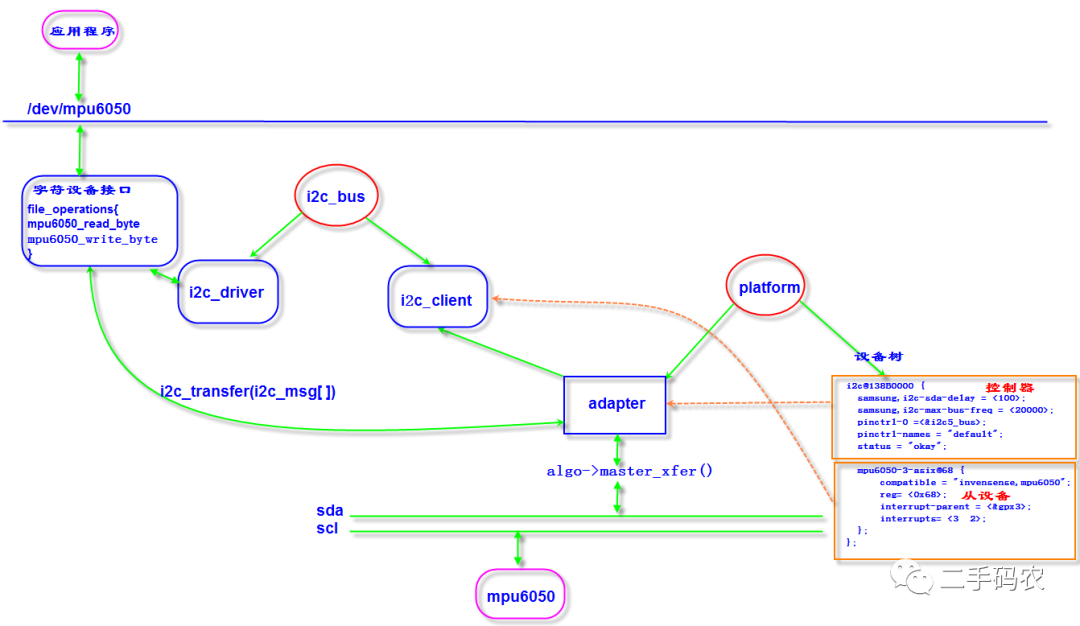
1. Йи±ёКчЅЪµг·ЦОЄїШЦЖЖчєНґУЙи±ёБЅІї·ЦЈ¬їШЦЖЖчЅЪµгРЕПў»бНЁ№эplatformЧЬПЯУлїШЦЖЖчЗэ¶ЇЖҐЕдЈ¬
їШЦЖЖчЗэ¶ЇТСѕУЙДЪєЛМṩЈ¬Ѕб№№МеИзПВЈє
2. ґУЙи±ёЅЪµгРЕПўЧоЦХ»бНЁ№эi2c_busУлi2c_driverЖҐЕдЈ¬i2c_driverРиТЄУЙїЄ·ўХЯЧФјєЧўІбЈ¬ІўКµПЦЧЦ·ыЙи±ёЅУїЪєНґґЅЁЙи±ёЅЪµг/dev/mpu6050Ј»
3. УГ»§НЁ№эЧЦ·ыЙи±ёЅЪµг/dev/mpu6050µчУГДЪєЛµДЧўІбµДЅУїЪєЇКэmpu6050_read_byteЎўmpu6050_write_byteЈ»
4. ДЪєЛµДi2c coreДЈїйМṩБЛi2cРТйПа№ШµДєЛРДєЇКэЈ¬ФЪКµПЦ¶БРґІЩЧчµДК±єтЈ¬РиТЄНЁ№эТ»ёцЦШТЄµДєЇКэi2c_transfer()Ј¬ХвёцєЇКэКЗi2cєЛРДМṩёшЙи±ёЗэ¶ЇµДЈ¬НЁ№эЛь·ўЛНµДКэѕЭРиТЄ±»ґт°ьіЙi2c_msgЅб№№Ј¬ХвёцєЇКэЧоЦХ»б»ШµчПаУ¦i2c_adapter->i2c_algorithm->master_xfer()ЅУїЪЅ«i2c_msg¶ФПу·ўЛНµЅi2cОпАнїШЦЖЖчЎЈ
У¦УГКµАэЈ¬КµПЦmpu6050Зэ¶ЇЈ¬¶БИЎОВ¶ИЈє
ЎѕЧўЎїКµАэЛщУГsocКЗexynos4412Ј¬ОЄИэРЗ№«ЛѕЛщіцЖ·Ј¬ЛщТФi2cїШЦЖЖчЙи±ёКчЅЪµгРЕПўїЙТФІОїјlinuxДЪєЛёщДїВјТФПВОДјюЈєDocumentation\devicetree\bindings\i2c\i2c-s3c2410.txtЎЈІ»Н¬µД№«ЛѕЙијЖµДi2cїШЦЖЖчЙи±ёКчЅЪµгРЕПўМоРґёсКЅІ»ѕЎПаН¬Ј¬РиТЄёщѕЭѕЯМеІъЖ·МоРґЎЈ
±аРґЗэ¶ЇґъВл
·ЦЕдЎўЙиЦГЎўЧўІбi2c_driverЅб№№Ме
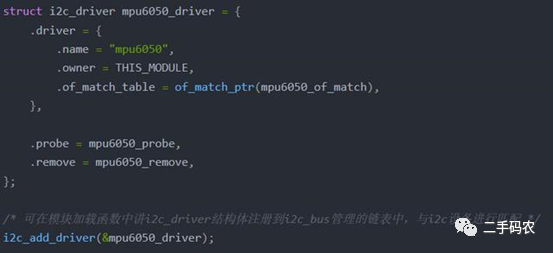
i2cЧЬПЯЗэ¶ЇДЈРНКфУЪЙи±ёДЈРНЦРµДТ»АаЈ¬Н¬Сщstruct i2c_driverЅб№№МејМіРУЪstruct driverЈ¬ЖҐЕд·Ѕ·ЁєНЙи±ёДЈРНЦРЅІµДТ»СщЈ¬ХвАпТЄИҐЖҐЕдЙи±ёКчЈ¬ЛщТФ±ШРлКµПЦi2c_driverЅб№№МеЦРµДdriverіЙФ±ЦРµДof_match_tableіЙФ±Јє

Из№ыєНЙи±ёКчЖҐЕдіЙ№¦Ј¬ДЗГґѕН»бµчУГprobeєЇКэ

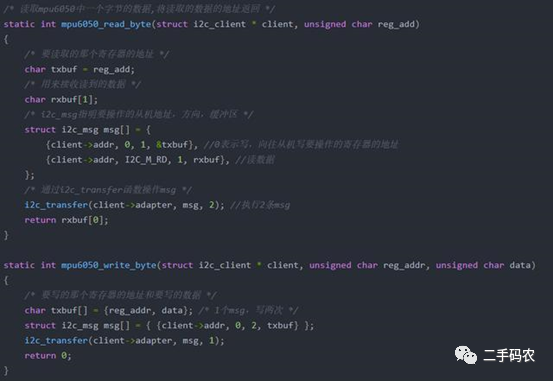
КµПЦОДјюІЩЧчјЇєП

ИзєОМоідi2c_msgЈї
ёщѕЭmpu6050µДdatasheetїЙЦЄЈ¬Птmpu6050РґИл1ёцdataєН¶БИЎ1ёцЦµµДК±Рт·Ц±рИзПВНјЛщКѕЎЈ


»щУЪLinuxµДi2cјЬ№№±аРґЗэ¶ЇіМРтЈ¬ОТГЗРиТЄУГstruct i2c_msgЅб№№МеАґ±нКѕЙПКцЛщУРРЕПўЎЈ

±аРґi2c_msgРЕПўФФтИзПВЈє
1. УРјёёцSРЕєЕЈ¬msgКэЧйѕНТЄУРјёёцФЄЛШЈ»2. addrОЄґУЙи±ёµШЦ·Ј¬НЁ№эi2cЧЬПЯµчУГЧўІбµДprobeєЇКэµДІОКэi2c_clientґ«µЭПВАґЈ»3. lenµДі¤¶ИІ»°ьАЁSЎўADЎўACKЎўPЈ»4. bufОЄТЄ·ўЛН»тХЯТЄ¶БИЎµДDATAµДДЪґжµШЦ·ЎЈЧЫЙПЛщКцЈє1. Single-Byte Write SequenceК±РтЦ»РиТЄ1ёцi2c_msg,lenЦµОЄ2Ј¬bufДЪИЭОЄКЗRAЎўDATAЈ»2. Single-Byte Read SequenceК±РтРиТЄ2ёцi2c_msg,lenЦµ·Ц±р¶јОЄ1Ј¬µЪ1ёцmsgµДbufКЗRAЈ¬µЪ2ёцmsgµДbuf»єіеЗшУГУЪґжИЎґУЙи±ё·ўЛНµДDATAЎЈ
03Зэ¶ЇЖЄ-Ц®ДЪєЛјЬ№№·ЦОц
НЁ№эЗ°БЅХВµДЅІЅвЈ¬ґујТ¶ФФЪВг»ъПВ¶БРґmpu6050єН»щУЪLinuxµДДЪєЛI2CїтјЬИзєО±аРґmpu6050Зэ¶Ї¶јТСѕУРБЛТ»¶ЁБЛЅвЎЈ±ѕОДТФlinux3.14.0ОЄІОїј, МЦВЫLinuxЦРµДi2cїШЦЖЖчЗэ¶ЇКЗµДЎЈ
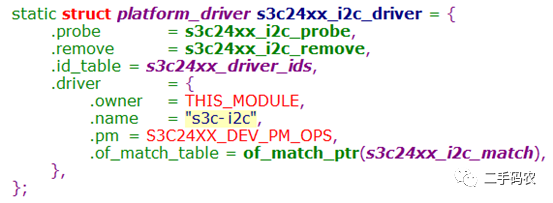
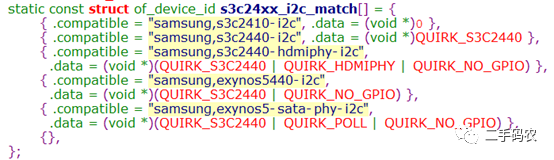
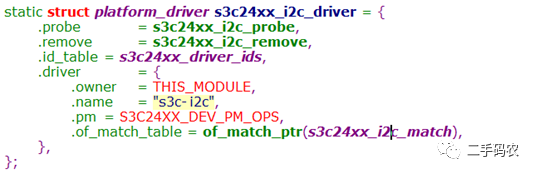
Зэ¶ЇИлїЪ
ИэРЗµДi2cїШЦЖЖчЗэ¶ЇКЗ»щУЪplatformЧЬПЯКµПЦµДЈ¬struct platform_driver¶ЁТеИзПВЈє µ±Йи±ёКчЅЪµгРЕПўµДcompatibleРЕПўєНЧўІбµДplatform_driver.driver. of_match_tableЧЦ·ыґ®»бНЁ№эplatformЧЬПЯµДmacth·Ѕ·ЁЅшРРЕд¶ФЈ¬ЖҐЕдіЙ№¦єу»бµчУГprobeєЇКэs3c24xx_i2c_probeЈЁЈ©Ј»
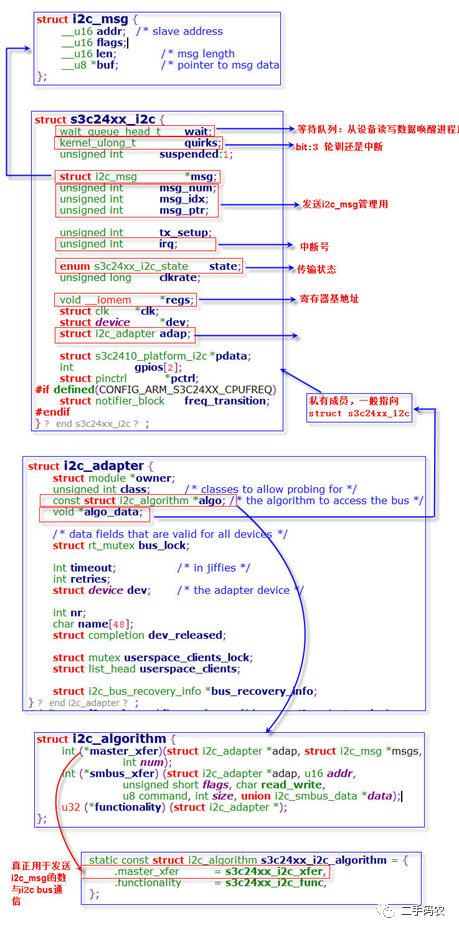
ЗэєЛРДЅб№№
ТЄАнЅвi2cµДДЪєЛјЬ№№КЧПИ±ШРлБЛЅвТ»ПВХвјёёц»ъ№№МеЈє s3c24xx_i2c ёГЅб№№МеКЗИэРЗi2cїШЦЖЖчЧЁУГЅб№№МеЈ¬ГиКцБЛїШЦЖЖчµДЛщУРЧКФґЈ¬°ьАЁУГУЪµИґэЦР¶П»ЅРСµДµИґэ¶УБРЎўґ«Кдi2c_msgµДБЩК±ЦёХлЎўјЗВјУлУІјюНЁРЕµДЧґМ¬ЎўЦР¶ПєЕЎўїШЦЖЖч»щµШЦ·ЎўК±ЦУЎўi2c_adapterЎўЙи±ёКчРЕПўpdataµИЎЈi2cїШЦЖЖчіхКј»ЇµДК±єт»бОЄёГїШЦЖЖчґґЅЁёГЅб№№Ме±дБїЈ¬ІўіхКј»ЇЦ®ЎЈ i2c_adapter ¶ФПуКµПЦБЛТ»ЧйНЁ№эТ»ёцi2cїШЦЖЖч·ўЛНПыПўµДЛщУРРЕПў, °ьАЁК±Рт, µШЦ·µИµИ, јґ·вЧ°БЛi2cїШЦЖЖчµД"їШЦЖРЕПў"ЎЈЛь±»i2cЦч»ъЗэ¶ЇґґЅЁ, НЁ№эclienУтєНi2c_clientєНi2c_driverПаБ¬, ХвСщЙи±ё¶ЛЗэ¶ЇѕНїЙТФНЁ№эЖдЦРµД·Ѕ·ЁТФј°i2cОпАнїШЦЖЖчАґєНТ»ёцi2cЧЬПЯµДОпАнЙи±ёЅшРРЅ»»ҐЎЈ i2c_algorithm ГиКцТ»ёцi2cЦч»ъµД·ўЛНК±РтµДРЕПўЈ¬ёГАаµД¶ФПуalgoКЗi2c_adapterµДТ»ёцУтЈ¬ЖдЦРЧўІбµДєЇКэmaster_xfer()ЧоЦХ±»Йи±ёЗэ¶Ї¶ЛµДi2c_transfer()»ШµчЎЈ i2c_msg ГиКцТ»ёцФЪЙи±ё¶ЛєНЦч»ъ¶ЛЦ®јдЅшРРБч¶ЇµДКэѕЭ, ФЪЙи±ёЗэ¶ЇЦРґт°ьІўНЁ№эi2c_transfer()·ўЛНЎЈПаµ±УЪskbufЦ®УЪНшВзЙи±ёЈ¬urbЦ®УЪUSBЙи±ёЎЈ ХвјёёцЅб№№МеЦ®јд№ШПµЈє
i2c_client ГиКцТ»ёц№ТЅУФЪУІјюi2cЧЬПЯЙПµДЙи±ёµДЙи±ёРЕПўЈ¬јґi2cЙи±ёµДЙи±ё¶ФПуЈ¬Улi2c_driver¶ФПуЖҐЕдіЙ№¦єуНЁ№эdetectedєНi2c_driverТФј°i2c_adapterПаБ¬Ј¬ФЪїШЦЖЖчЗэ¶ЇУлїШЦЖЖчЙи±ёЖҐЕдіЙ№¦єу±»їШЦЖЖчЗэ¶ЇНЁ№эi2c_new_device()ґґЅЁЎЈґУЙи±ёЛщ№ТФШµДi2cїШЦЖЖч»бФЪіхКј»ЇµДК±єт±ЈґжµЅіЙФ±adapterЎЈ i2c_driver ГиКцТ»ёц№ТЅУФЪУІјюi2cЧЬПЯЙПµДЙи±ёµДЗэ¶Ї·Ѕ·ЁЈ¬јґi2cЙи±ёµДЗэ¶Ї¶ФПуЈ¬НЁ№эi2c_bus_typeєНЙи±ёРЕПўi2c_clientЖҐЕдЈ¬ЖҐЕдіЙ№¦єуНЁ№эclientsєНi2c_client¶ФПуТФј°i2c_adapter¶ФПуПаБ¬ЎЈ ИзЙПНјЛщКѕЈєLinuxДЪєЛО¬»¤БЛi2c busЧЬПЯЈ¬ЛщУРµДi2cґУЙи±ёРЕПў¶ј»бЧЄ»»іЙi2c_client,ІўЧўІбµЅi2cЧЬПЯ,Г»УРЙи±ёµДЗйїцПВТ»°гМоРґФЪТ»ПВОДјюЦРЈє linux-3.14-fs4412\arch\arm\mach-s5pc100\ Mach-smdkc100.c ДЪєЛЖф¶Ї»бЅ«i2c_board_infoЅб№№МеЧЄ»»іЙi2c_clientЎЈ УРЙи±ёКчµДЗйїцПВЈ¬ДЪєЛЖф¶Ї»бЧФ¶ЇЅ«Йи±ёКчЅЪµгЧЄ»»іЙi2c_clientЎЈ i2c_adapter ОТКЧПИЛµi2c_adapter, ІўІ»КЗ±аРґТ»ёцi2cЙи±ёЗэ¶ЇРиТЄЛь, НЁіЈОТГЗФЪЕдЦГДЪєЛµДК±єтТСѕЅ«i2cїШЦЖЖчµДЙи±ёРЕПўєНЗэ¶ЇТСѕ±аТлЅшДЪєЛБЛ, ѕНКЗХвёцadapter¶ФПуТСѕґґЅЁєГБЛ, µ«КЗБЛЅвЖдЦРµДіЙФ±¶ФУЪАнЅвi2cЗэ¶ЇїтјЬ·ЗіЈЦШТЄ, ЛщУРµДЙи±ёЗэ¶Ї¶јТЄѕ№эХвёц¶ФПуµДґ¦АнІЕДЬєНОпАнЙи±ёНЁРЕ //include/linux/i2c.h 428-->Хвёцi2cїШЦЖЖчРиТЄµДїШЦЖЛг·Ё, ЖдЦРЧоЦШТЄµДіЙФ±КЗmaster_xfer()ЅУїЪ, ХвёцЅУїЪКЗУІјюПа№ШµД, АпГжµДІЩЧч¶јКЗ»щУЪѕЯМеµДSoC i2cјДґжЖчµД, ЛьЅ«НкіЙЅ«КэѕЭ·ўЛНµЅОпАнi2cїШЦЖЖчµД"ЧоєуТ»№«Ап" 436-->±нКѕХвёцТ»ёцdevice, »б№ТЅУµЅДЪєЛЦРµДБґ±нЦРАґ№ЬАн, ЖдЦРµД 443-->ХвёцЅЪµгЅ«Т»ёцi2c_adapter¶ФПуєНЛьЛщКфµДi2c_client¶ФПуТФј°ПаУ¦µДi2c_driver¶ФПуБ¬ЅУµЅТ»Жр ПВГжКЗ2ёцi2c-core.cМṩµДi2c_adapterЦ±ЅУПа№ШµДІЩЧчAPI, НЁіЈТІІ»РиТЄЙи±ёЗэ¶ЇїЄ·ўЦРК№УГЎЈ
adapterіхКј»Ї
i2cїШЦЖЖчЙи±ёКчЅЪµгРЕПўНЁ№эplatformЧЬПЯґ«µЭПВАґЈ¬јґІОКэpdevЎЈprobeєЇКэЦчТЄ№¦ДЬКЗіхКј»ЇadapterЈ¬ЙкЗлi2cїШЦЖЖчРиТЄµДёчЦЦЧКФґЈ¬Н¬К±НЁ№эЙи±ёКчЅЪµгіхКј»ЇёГїШЦЖЖчПВµДЛщУРґУЙи±ёЈ¬ґґЅЁi2c_clientЅб№№МеЎЈ
ps3c24xx_i2c_probe
[size=0.32]static int s3c24xx_i2c_probe(struct platform_device *pdev) [size=0.32]{ [size=0.32] struct s3c24xx_i2c *i2c;//ЧоЦШТЄµДЅб№№Ме [size=0.32] //±ЈґжЙи±ёКчРЕПў [size=0.32] struct s3c2410_platform_i2c *pdata = NULL; [size=0.32] struct resource *res; [size=0.32] int ret;
[size=0.32] if (!pdev->dev.of_node) { [size=0.32] pdata = dev_get_platdata(&pdev->dev); [size=0.32] if (!pdata) { [size=0.32] dev_err(&pdev->dev, "no platform data\n"); [size=0.32] return -EINVAL; [size=0.32] } [size=0.32] } [size=0.32] /*ОЄЅб№№Ме±дБїi2c·ЦЕдДЪґж*/ [size=0.32] i2c = devm_kzalloc(&pdev->dev, sizeof(struct s3c24xx_i2c), GFP_KERNEL); [size=0.32] if (!i2c) { [size=0.32] dev_err(&pdev->dev, "no memory for state\n"); [size=0.32] return -ENOMEM; [size=0.32] }
[size=0.32] i2c->pdata = devm_kzalloc(&pdev->dev, sizeof(*pdata), GFP_KERNEL); [size=0.32] if (!i2c->pdata) { [size=0.32] dev_err(&pdev->dev, "no memory for platform data\n"); [size=0.32] return -ENOMEM; [size=0.32] } [size=0.32] /*i2cїШЦЖЖчµДТ»Р©МШКвРРОЄ [size=0.32] #define QUIRK_S3C2440 (1 << 0) [size=0.32] #define QUIRK_HDMIPHY (1 << 1) [size=0.32] #define QUIRK_NO_GPIO (1 << 2) [size=0.32] #define QUIRK_POLL (1 << 3) [size=0.32] ЖдЦРbiteЈє3Из№ыІЙУГВЦСµ·ЅКЅУлµЧІгУІјюНЁРЕЦµОЄ1Ј¬ЦР¶П·ЅКЅЦµОЄ0*/ [size=0.32] i2c->quirks = s3c24xx_get_device_quirks(pdev); [size=0.32] if (pdata) [size=0.32] memcpy(i2c->pdata, pdata, sizeof(*pdata)); [size=0.32] else [size=0.32] s3c24xx_i2c_parse_dt(pdev->dev.of_node, i2c);
[size=0.32] strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name)); [size=0.32] i2c->adap.owner = THIS_MODULE; [size=0.32] /*ОЄi2c_msgґ«Кд·Ѕ·ЁёіЦµЈ¬*/ [size=0.32] i2c->adap.algo = &s3c24xx_i2c_algorithm; [size=0.32] i2c->adap.retries = 2; [size=0.32] i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD; [size=0.32] i2c->tx_setup = 50; [size=0.32] //іхКј»ЇµИґэ¶УБРЈ¬ёГµИґэ¶УБРУГУЪ»ЅРС¶БРґКэѕЭµДЅшіМ [size=0.32] init_waitqueue_head(&i2c->wait);
[size=0.32] /* find the clock and enable it */
[size=0.32] i2c->dev = &pdev->dev; [size=0.32] //»сИЎК±ЦУ [size=0.32] i2c->clk = devm_clk_get(&pdev->dev, "i2c"); [size=0.32] if (IS_ERR(i2c->clk)) { [size=0.32] dev_err(&pdev->dev, "cannot get clock\n"); [size=0.32] return -ENOENT; [size=0.32] } [size=0.32] dev_dbg(&pdev->dev, "clock source %p\n", i2c->clk); [size=0.32] /* map the registers */ [size=0.32] //НЁ№эpdevµГµЅi2cїШЦЖЖчµДјДґжЖчµШЦ·ЧКФґ [size=0.32] res = platform_get_resource(pdev, IORESOURCE_MEM, 0); [size=0.32] //УіЙдi2cїШЦЖЖчµДОпАн»щµШЦ·ОЄРйДв»щµШЦ· [size=0.32] i2c->regs = devm_ioremap_resource(&pdev->dev, res);
[size=0.32] if (IS_ERR(i2c->regs)) [size=0.32] return PTR_ERR(i2c->regs);
[size=0.32] dev_dbg(&pdev->dev, "registers %p (%p)\n", [size=0.32] i2c->regs, res);
[size=0.32] /* setup info block for the i2c core */ [size=0.32] /*Ѕ«Ѕб№№Ме±дБїi2c±ЈґжµЅi2c_adapterµДЛЅУР±дБїЦёХлalgo_dataЈ¬ [size=0.32] ±аРґi2cЙи±ёЗэ¶ЇїЙТФНЁ№эadapterЦёХлХТµЅЅб№№Меi2c*/ [size=0.32] i2c->adap.algo_data = i2c; [size=0.32] i2c->adap.dev.parent = &pdev->dev;
[size=0.32] i2c->pctrl = devm_pinctrl_get_select_default(i2c->dev);
[size=0.32] /* inititalise the i2c gpio lines */ [size=0.32] //µГµЅi2cёґУГµДgpioТэЅЕІўіхКј»Ї [size=0.32] if (i2c->pdata->cfg_gpio) { [size=0.32] i2c->pdata->cfg_gpio(to_platform_device(i2c->dev)); [size=0.32] } else if (IS_ERR(i2c->pctrl) && s3c24xx_i2c_parse_dt_gpio(i2c)) { [size=0.32] return -EINVAL; [size=0.32] }
[size=0.32] /* initialise the i2c controller */
[size=0.32] clk_prepare_enable(i2c->clk); [size=0.32] /*Ѕ«ґУЙи±ёµШЦ·РґИлјДґжЖчS3C2410_IICADDЈ¬Н¬К±іхКј»ЇК±ЦУЖµВК*/ [size=0.32] ret = s3c24xx_i2c_init(i2c); [size=0.32] clk_disable_unprepare(i2c->clk); [size=0.32] if (ret != 0) { [size=0.32] dev_err(&pdev->dev, "I2C controller init failed\n"); [size=0.32] return ret; [size=0.32] } [size=0.32] /* find the IRQ for this unit (note, this relies on the init call to [size=0.32] * ensure no current IRQs pending [size=0.32] */
[size=0.32] if (!(i2c->quirks & QUIRK_POLL)) { [size=0.32] /*»сµГЦР¶ПєЕ*/ [size=0.32] i2c->irq = ret = platform_get_irq(pdev, 0); [size=0.32] if (ret <= 0) { [size=0.32] dev_err(&pdev->dev, "cannot find IRQ\n"); [size=0.32] return ret; [size=0.32] } [size=0.32] /*ЧўІбЦР¶Пґ¦АнєЇКэs3c24xx_i2c_irq()*/ [size=0.32] ret = devm_request_irq(&pdev->dev, i2c->irq, s3c24xx_i2c_irq, 0, [size=0.32] dev_name(&pdev->dev), i2c);
[size=0.32] if (ret != 0) { [size=0.32] dev_err(&pdev->dev, "cannot claim IRQ %d\n", i2c->irq); [size=0.32] return ret; [size=0.32] } [size=0.32] }
[size=0.32] ret = s3c24xx_i2c_register_cpufreq(i2c); [size=0.32] if (ret < 0) { [size=0.32] dev_err(&pdev->dev, "failed to register cpufreq notifier\n"); [size=0.32] return ret; [size=0.32] }
[size=0.32] /* Note, previous versions of the driver used i2c_add_adapter() [size=0.32] * to add the bus at any number. We now pass the bus number via [size=0.32] * the platform data, so if unset it will now default to always [size=0.32] * being bus 0. [size=0.32] */ [size=0.32] /*±Јґжi2cїШЦЖЖчµДНЁµАєЕЈ¬±ѕАэКЗbus 5*/ [size=0.32] i2c->adap.nr = i2c->pdata->bus_num; [size=0.32] i2c->adap.dev.of_node = pdev->dev.of_node; [size=0.32] //ЧўІбadapter [size=0.32] ret = i2c_add_numbered_adapter(&i2c->adap); [size=0.32] if (ret < 0) { [size=0.32] dev_err(&pdev->dev, "failed to add bus to i2c core\n"); [size=0.32] s3c24xx_i2c_deregister_cpufreq(i2c); [size=0.32] return ret; [size=0.32] } [size=0.32] /*±ЈґжЛЅУР±дБїi2cµЅpdev->dev->p->driver_data*/ [size=0.32] platform_set_drvdata(pdev, i2c);
[size=0.32] pm_runtime_enable(&pdev->dev); [size=0.32] pm_runtime_enable(&i2c->adap.dev);
[size=0.32] dev_info(&pdev->dev, "%s: S3C I2C adapter\n", dev_name(&i2c->adap.dev)); [size=0.32] return 0; [size=0.32]} |
i2c_add_numbered_adapter
АП°ж±ѕµДЧўІбєЇКэОЄi2c_add_adapter()РВµД°ж±ѕ¶ФёГєЇКэЧцБЛ·вЧ°Ј¬Ѕ«i2cїШЦЖµДНЁµАєЕЧцБЛЧўІбЈ¬Д¬ИПЗйїцПВnrЦµОЄ0. i2c_add_numbered_adapter->__i2c_add_numbered_adapter-> i2c_register_adapter [size=0.32]int i2c_add_numbered_adapter(struct i2c_adapter *adap) [size=0.32]{ [size=0.32] if (adap->nr == -1) /* -1 means dynamically assign bus id */ [size=0.32] return i2c_add_adapter(adap);
[size=0.32] return __i2c_add_numbered_adapter(adap); [size=0.32]} |
i2c_add_adapter
[size=0.32]static int i2c_register_adapter(struct i2c_adapter *adap) [size=0.32]{ [size=0.32] int res = 0;
[size=0.32] /* Can't register until after driver model init */ [size=0.32] if (unlikely(WARN_ON(!i2c_bus_type.p))) { [size=0.32] res = -EAGAIN; [size=0.32] goto out_list; [size=0.32] }
[size=0.32] /* Sanity checks */ [size=0.32] if (unlikely(adap->name[0] == '\0')) { [size=0.32] pr_err("i2c-core: Attempt to register an adapter with " [size=0.32] "no name!\n"); [size=0.32] return -EINVAL; [size=0.32] } [size=0.32] if (unlikely(!adap->algo)) { [size=0.32] pr_err("i2c-core: Attempt to register adapter '%s' with " [size=0.32] "no algo!\n", adap->name); [size=0.32] return -EINVAL; [size=0.32] }
[size=0.32] rt_mutex_init(&adap->bus_lock); [size=0.32] mutex_init(&adap->userspace_clients_lock); [size=0.32] INIT_LIST_HEAD(&adap->userspace_clients);
[size=0.32] /* Set default timeout to 1 second if not already set */ [size=0.32] if (adap->timeout == 0) [size=0.32] adap->timeout = HZ; [size=0.32] //ЙиЦГadapterГыЧЦ,±ѕАэЧўІбєу»бЙъіЙТФПВЅЪµг/dev/i2c-5 [size=0.32] dev_set_name(&adap->dev, "i2c-%d", adap->nr); [size=0.32] adap->dev.bus = &i2c_bus_type; [size=0.32] adap->dev.type = &i2c_adapter_type; [size=0.32] res = device_register(&adap->dev); [size=0.32] if (res) [size=0.32] goto out_list;
[size=0.32] dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
[size=0.32]#ifdef CONFIG_I2C_COMPAT [size=0.32] res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev, [size=0.32] adap->dev.parent); [size=0.32] if (res) [size=0.32] dev_warn(&adap->dev, [size=0.32] "Failed to create compatibility class link\n"); [size=0.32]#endif
[size=0.32] /* bus recovery specific initialization */ [size=0.32] /*іхКј»ЇsdaЎўsclЈ¬НЁіЈХвБЅёцТэЅЕ»бёґУГgpioТэЅЕ*/ [size=0.32] if (adap->bus_recovery_info) { [size=0.32] struct i2c_bus_recovery_info *bri = adap->bus_recovery_info;
[size=0.32] if (!bri->recover_bus) { [size=0.32] dev_err(&adap->dev, "No recover_bus() found, not using recovery\n"); [size=0.32] adap->bus_recovery_info = NULL; [size=0.32] goto exit_recovery; [size=0.32] }
[size=0.32] /* Generic GPIO recovery */ [size=0.32] if (bri->recover_bus == i2c_generic_gpio_recovery) { [size=0.32] if (!gpio_is_valid(bri->scl_gpio)) { [size=0.32] dev_err(&adap->dev, "Invalid SCL gpio, not using recovery\n"); [size=0.32] adap->bus_recovery_info = NULL; [size=0.32] goto exit_recovery; [size=0.32] }
[size=0.32] if (gpio_is_valid(bri->sda_gpio)) [size=0.32] bri->get_sda = get_sda_gpio_value; [size=0.32] else [size=0.32] bri->get_sda = NULL;
[size=0.32] bri->get_scl = get_scl_gpio_value; [size=0.32] bri->set_scl = set_scl_gpio_value; [size=0.32] } else if (!bri->set_scl || !bri->get_scl) { [size=0.32] /* Generic SCL recovery */ [size=0.32] dev_err(&adap->dev, "No {get|set}_gpio() found, not using recovery\n"); [size=0.32] adap->bus_recovery_info = NULL; [size=0.32] } [size=0.32] }
[size=0.32]exit_recovery: [size=0.32] /* create pre-declared device nodes */ [size=0.32] /*НЁ№эЙи±ёКчЅЪµгЧўІбЛщУРёГїШЦЖЖчПВµДЛщУРґУЙи±ё*/ [size=0.32] of_i2c_register_devices(adap); [size=0.32] acpi_i2c_register_devices(adap); [size=0.32] /*Ул¶ЇМ¬·ЦЕдµДЧЬПЯєЕПа№ШЈ¬¶ЇМ¬·ЦЕдµДЧЬПЯєЕУ¦ёГКЗґУТСѕПЦУРЧоґуЧЬПЯєЕ»щґЎЙП+1µДЈ¬ [size=0.32] ХвСщДЬ№»±ЈЦ¤¶ЇМ¬·ЦЕдіцµДЧЬПЯєЕУл°еј¶ЧЬПЯєЕІ»»бІъЙъіеН» [size=0.32] ФЪГ»УРЙи±ёКчЗйїцПВЈ¬»б»щУЪ¶УБР__i2c_board_list, ґґЅЁi2c_client [size=0.32] ЖдЦРЅЪµгstruct i2c_board_infoКЦ¶ЇМоРґ*/ [size=0.32] if (adap->nr < __i2c_first_dynamic_bus_num) [size=0.32] i2c_scan_static_board_info(adap);
[size=0.32] /* Notify drivers */ [size=0.32] mutex_lock(&core_lock); [size=0.32] bus_for_each_drv(&i2c_bus_type, NULL, adap, __process_new_adapter); [size=0.32] mutex_unlock(&core_lock);
[size=0.32] return 0;
[size=0.32]out_list: [size=0.32] mutex_lock(&core_lock); [size=0.32] idr_remove(&i2c_adapter_idr, adap->nr); [size=0.32] mutex_unlock(&core_lock); [size=0.32] return res; [size=0.32]} |
of_i2c_register_devices
ёГєЇКэУГУЪЅ«ґУЙи±ёЅЪµгЧЄ»»іЙi2c_clientЈ¬ІўЧўІбµЅi2cЧЬПЯЙПЎЈ [size=0.32]static void of_i2c_register_devices(struct i2c_adapter *adap) [size=0.32]{ [size=0.32] void *result; [size=0.32] struct device_node *node;
[size=0.32] /* Only register child devices if the adapter has a node pointer set */ [size=0.32] if (!adap->dev.of_node) [size=0.32] return;
[size=0.32] dev_dbg(&adap->dev, "of_i2c: walking child nodes\n");
[size=0.32] for_each_available_child_of_node(adap->dev.of_node, node) { [size=0.32] struct i2c_board_info info = {}; [size=0.32] struct dev_archdata dev_ad = {}; [size=0.32] const __be32 *addr; [size=0.32] int len;
[size=0.32] dev_dbg(&adap->dev, "of_i2c: register %s\n", node->full_name);
[size=0.32] if (of_modalias_node(node, info.type, sizeof(info.type)) < 0) { [size=0.32] dev_err(&adap->dev, "of_i2c: modalias failure on %s\n", [size=0.32] node->full_name); [size=0.32] continue; [size=0.32] } [size=0.32] /*»сИЎґУЙи±ёµДµШЦ·*/ [size=0.32] addr = of_get_property(node, "reg", &len); [size=0.32] if (!addr || (len < sizeof(int))) { [size=0.32] dev_err(&adap->dev, "of_i2c: invalid reg on %s\n", [size=0.32] node->full_name); [size=0.32] continue; [size=0.32] } [size=0.32] /*ґжґўґУЙи±ёµШЦ·*/ [size=0.32] info.addr = be32_to_cpup(addr); [size=0.32] if (info.addr > (1 << 10) - 1) { [size=0.32] dev_err(&adap->dev, "of_i2c: invalid addr=%x on %s\n", [size=0.32] info.addr, node->full_name); [size=0.32] continue; [size=0.32] } [size=0.32] /*»сИЎЦР¶ПєЕ*/ [size=0.32] info.irq = irq_of_parse_and_map(node, 0); [size=0.32] info.of_node = of_node_get(node); [size=0.32] info.archdata = &dev_ad; [size=0.32] /*»сИЎЙи±ёКчЅЪµгwakeup-sourceРЕПў*/ [size=0.32] if (of_get_property(node, "wakeup-source", NULL)) [size=0.32] info.flags |= I2C_CLIENT_WAKE;
[size=0.32] request_module("%s%s", I2C_MODULE_PREFIX, info.type); [size=0.32] /*Ѕ«i2c_board_infoЧЄ»»іЙi2c_clientІўЧўІбµЅi2cЧЬПЯ*/ [size=0.32] result = i2c_new_device(adap, &info); [size=0.32] if (result == NULL) { [size=0.32] dev_err(&adap->dev, "of_i2c: Failure registering %s\n", [size=0.32] node->full_name); [size=0.32] of_node_put(node); [size=0.32] irq_dispose_mapping(info.irq); [size=0.32] continue; [size=0.32] } [size=0.32] } [size=0.32]} |
i2c_new_device ( )
Ѕ«i2c_board_infoЧЄ»»іЙi2c_clientІўЧўІбµЅLinuxєЛРДЎЈ [size=0.32]{ [size=0.32] struct i2c_client *client; [size=0.32] int status; [size=0.32] /*ёшi2c_client·ЦЕдДЪґж*/ [size=0.32] client = kzalloc(sizeof *client, GFP_KERNEL); [size=0.32] if (!client) [size=0.32] return NULL; [size=0.32] /*Ѕ«adapterµДµШЦ·±ЈґжµЅi2c_client->adapterЈ¬ [size=0.32] ФЪЗэ¶ЇєЇКэЦРїЙТФНЁ№эi2c_clientХТµЅadapter*/ [size=0.32] client->adapter = adap;
[size=0.32] client->dev.platform_data = info->platform_data;
[size=0.32] if (info->archdata) [size=0.32] client->dev.archdata = *info->archdata; [size=0.32] /*±ЈґжґУЙи±ёµШЦ·АаРН*/ [size=0.32] client->flags = info->flags; [size=0.32] /*±ЈґжґУЙи±ёµШЦ·*/ [size=0.32] client->addr = info->addr; [size=0.32] /*±ЈґжґУЙи±ёЦР¶ПєЕ*/ [size=0.32] client->irq = info->irq; [size=0.32] [size=0.32] strlcpy(client->name, info->type, sizeof(client->name));
[size=0.32] /* Check for address validity */ [size=0.32] /*јмІвґУЙи±ёµШЦ·КЗ·сєП·Ё*/ [size=0.32] status = i2c_check_client_addr_validity(client); [size=0.32] if (status) { [size=0.32] dev_err(&adap->dev, "Invalid %d-bit I2C address 0x%02hx\n", [size=0.32] client->flags & I2C_CLIENT_TEN ? 10 : 7, client->addr); [size=0.32] goto out_err_silent; [size=0.32] }
[size=0.32] /* Check for address business */ [size=0.32] /*јмІвґУЙи±ёµШЦ·КЗ·с±»ХјУГ*/ [size=0.32] status = i2c_check_addr_busy(adap, client->addr); [size=0.32] if (status) [size=0.32] goto out_err; [size=0.32] /*ЅЁБўґУЙи±ёУлККЕдЖчµДёёЧУ№ШПµ*/ [size=0.32] client->dev.parent = &client->adapter->dev; [size=0.32] client->dev.bus = &i2c_bus_type; [size=0.32] client->dev.type = &i2c_client_type; [size=0.32] client->dev.of_node = info->of_node; [size=0.32] ACPI_COMPANION_SET(&client->dev, info->acpi_node.companion);
[size=0.32] i2c_dev_set_name(adap, client); [size=0.32] /*ЧўІбµЅLinuxєЛРД*/ [size=0.32] status = device_register(&client->dev); [size=0.32] if (status) [size=0.32] goto out_err;
[size=0.32] dev_dbg(&adap->dev, "client [%s] registered with bus id %s\n", [size=0.32] client->name, dev_name(&client->dev));
[size=0.32] return client;
[size=0.32]out_err: [size=0.32] dev_err(&adap->dev, "Failed to register i2c client %s at 0x%02x " [size=0.32] "(%d)\n", client->name, client->addr, status); [size=0.32]out_err_silent: [size=0.32] kfree(client); [size=0.32] return NULL; [size=0.32]} |
i2c_msgИзєОґ«µЭЈї
єЛРД·Ѕ·Ёi2c_transfer
l i2c_transfer()КЗi2cєЛРДМṩёшЙи±ёЗэ¶ЇµД·ўЛН·Ѕ·Ё, НЁ№эЛь·ўЛНµДКэѕЭРиТЄ±»ґт°ьіЙi2c_msg, ХвёцєЇКэЧоЦХ»б»ШµчПаУ¦i2c_adapter->i2c_algorithm->master_xfer()ЅУїЪЅ«i2c_msg¶ФПу·ўЛНµЅi2cОпАнїШЦЖЖчЈ¬ i2c_adapte->algoФЪєЇКэs3c24xx_i2c_probeЈЁЈ©ЦРёіЦµЈє ёГ±дБї¶ЁТеИзПВЈє i2c_transfer()ЧоЦХ»бµчУГєЇКэs3c24xx_i2c_xferЈЁЈ©Ј»
i2c_msgЦР¶Пґ«Кд
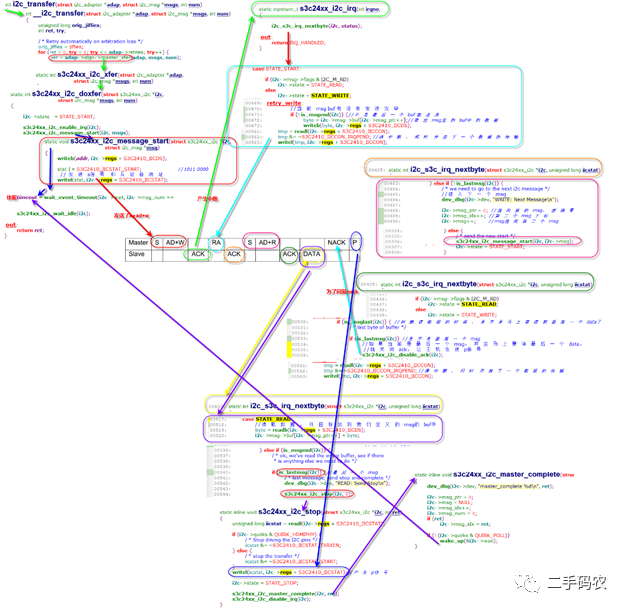
ТФПВКЗТ»ґОi2c_msgґ«КдµДЦР¶ПДЈКЅµДґуёЕІЅЦиЈє
1Ј® i2c_transfer()КЧПИНЁ№эєЇКэi2c_trylock_adapterЈЁЈ©іўКФ»сµГadapterµДїШЦЖИЁЎЈИз№ыadapterХэФЪГ¦Фт·µ»ШґнОуРЕПўЈ»
2Ј® __i2c_transferЈЁЈ©НЁ№эµчУГ·Ѕ·Ёadap->algo->master_xfer(adap, msgs, num)ґ«Кдi2c_msg,Из№ыК§°Ь»біўКФЦШРВґ«ЛНЈ¬ЦШґ«ґОКэЧо¶аadap->retriesЈ»
3Ј® adap->algo->master_xferЈЁЈ©ѕНКЗєЇКэs3c24xx_i2c_xferЈЁЈ©Ј¬ёГєЇКэЧоЦХµчУГ s3c24xx_i2c_doxfer(i2c, msgs, num)ґ«КдРЕПўЈ»
4Ј® s3c24xx_i2c_doxferЈЁЈ©НЁ№эєЇКэs3c24xx_i2c_message_start(i2c, msgs)ІъЙъSєНAD+WµДРЕєЕЈ¬И»єуНЁ№эєЇКэwait_event_timeout( )ЧиИыФЪµИґэ¶УБРi2c->waitЙПЈ»
5Ј® УТЙПЅЗК±Ртmpu6050µДРґєН¶БµДК±РтЈ¬ґУЙи±ё»ШёґACKєНDATA¶ј»б·ўЛНЦР¶ПРЕєЕёшCPUЎЈГїґОЦР¶П¶ј»бµчУГs3c24xx_i2c_irq->i2c_s3c_irq_nextbyte,
6Ј® ЧоєуТ»ґОЦР¶ПЈ¬ЛщУРКэѕЭ·ўЛН»т¶БИЎНк±П»бµчУГs3c24xx_i2c_stop->s3c24xx_i2c_master_completeЈ¬НЁ№эwake_up»ЅРСЧиИыФЪµИґэ¶УБРi2c->waitЙПµДИООсЎЈ
ПкПёµДґъВлБчіМИзПВЈє
¶ФЧЕїЙТФёщѕЭЙПНјґъВлРРєЕТ»ІЅІЅИҐёъґъВлЈ¬Йжј°µЅјДґжЖчЙиЦГїЙТФІОїј
-END-
ЧЄФШ
ФОДБґЅУЈєhttps://m.21ic.com/article/850711.html
ГвФрЙщГчЈєХыАнОДХВОЄґ«ІҐПа№ШјјКхЈ¬°жИЁ№йФЧчХЯЛщУРЈ¬ИзУРЗЦИЁЈ¬ЗлБЄПµЙѕіэ
|
 /4
/4 
 |ОТµДОўІ©|РЎєЪОЭ|КЦ»ъ°ж|Archiver|YanFa.TechЈЁgaosupcb Inc.Ј©
|ОТµДОўІ©|РЎєЪОЭ|КЦ»ъ°ж|Archiver|YanFa.TechЈЁgaosupcb Inc.Ј©



 їъКУїЁ
їъКУїЁ АЧґпїЁ
АЧґпїЁ

 ·ў±нУЪ 2021-1-29 14:39:07
·ў±нУЪ 2021-1-29 14:39:07





 МбЙэїЁ
МбЙэїЁ ЦГ¶ҐїЁ
ЦГ¶ҐїЁ іБД¬їЁ
іБД¬їЁ РъПщїЁ
РъПщїЁ ±дЙ«їЁ
±дЙ«їЁ З§Ѕп¶Ґ
З§Ѕп¶Ґ ПФЙнїЁ
ПФЙнїЁ